ECON-4, SW version 1.4 rev.1, ©ComAp – March 2016 Draft 7
ECON-4 Reference guide.pdf
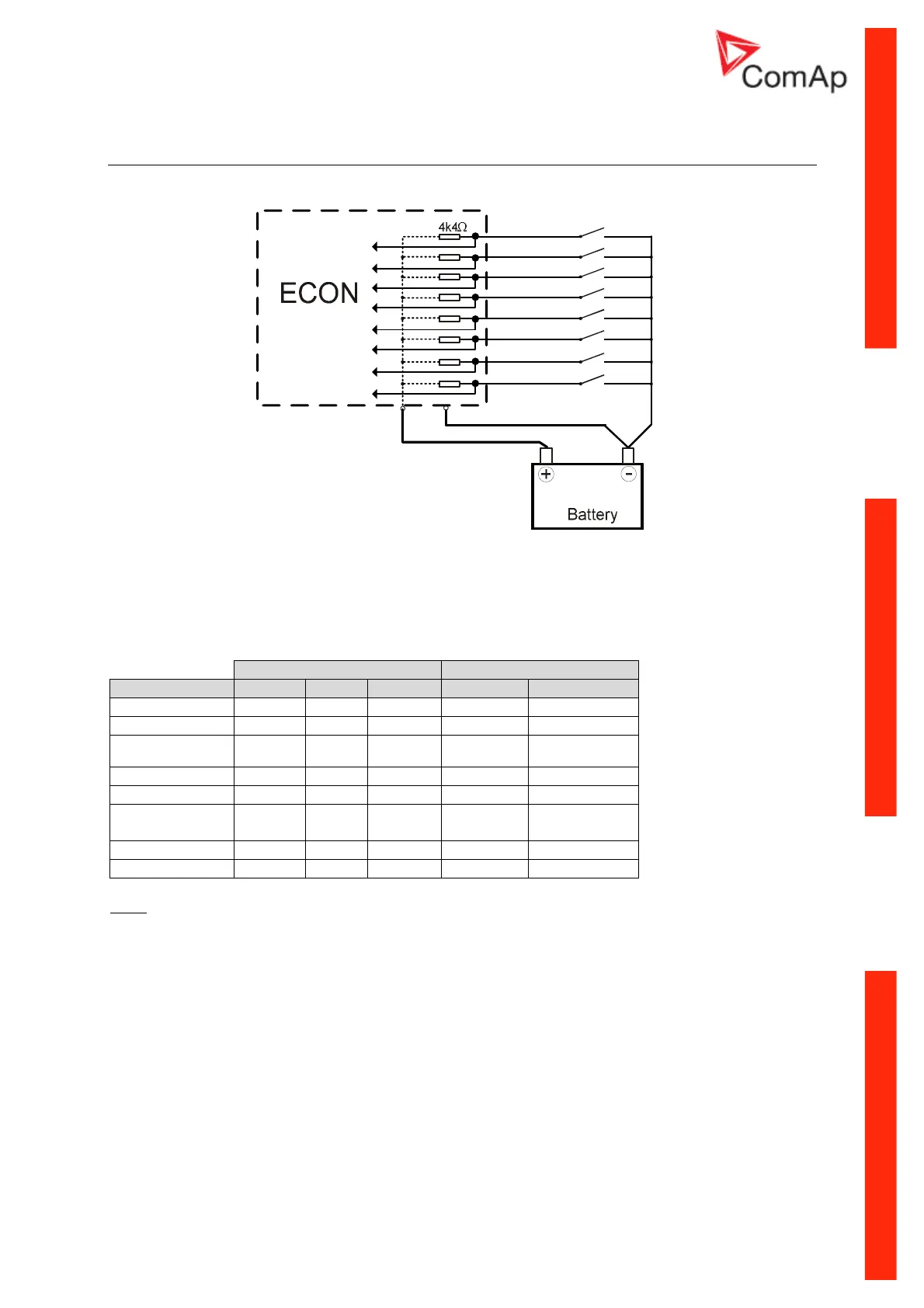
Binary inputs
Binary inputs have internal load resistor 4.4 kΩ connected to the battery plus.
Binary inputs are used to control the function of the ECON-4 digital governor.
Binary inputs can be read from:
• the physical Binary inputs (terminals S4.x),
• from the CAN-bus (byte Command in the Receive PDO),
in dependence on the value of the setpoint Speed request.
Table 4
Speed Request
CB Request
MCB fdb S4.1 Cmd.1
GCB fdb S4.2 Cmd.2
NOMINAL S4.3 S4.3 Cmd.2
SPEED UP S4.4 X X
SPEED DOWN S4.5 X X
RUN / STOP S4.6 S4.6
S4.6 &
Cmd.3
DROOP S4.7 S4.7 Cmd.4
RESERVE S4.8
Note:
Cmd.x is bit x in the byte Command of the Receive PDO, see description of CAN protocol.
S4.x is ECON-4 terminal.
Both the physical Binary input S4.6 and the corresponding bit Cmd.3 received via CAN bus
must be active to activate Binary input RUN in DATA mode.
In case of lost communication on CAN bus, all bits of the byte Command are set to 0 – it deactivates
input RUN and closes the actuators.
S4.1 Bin 1 MCB fdb
and
S4.2 GCB fdb
Inputs GCB fdb and MCB fdb decide which setpoints are used in PID speed regulation loop and which
type of regulation is used (Iddle/Island/Parallel):