ECON-4, SW version 1.4 rev.1, ©ComAp – March 2016 Draft 42
ECON-4 Reference guide.pdf
RPM StartRamp [s]
This setpoint defines speed of ramp from Starting RPM to Idle RPM. It is directly the time of ramp from
Starting RPM to Idle RPM.
Step: 1 s
Range: 1 – 100 s
Starting RPM [RPM]
If ECON-4 detects speed higher then Starting RPM, it terminates the starting sequence end starts
normal speed regulation.
Step: 1 RPM
Range: 0 – Idle RPM
Hint:
ECON-4 can work only if Starting RPM < Idle RPM < Nominal RPM. If this condition is not met, ECON-
4 activates bit Invalid setpoints in Transmit PDO 1, see description of CAN protocol. It is not possible
to run the engine if the bit Invalid setpoint is signalized.
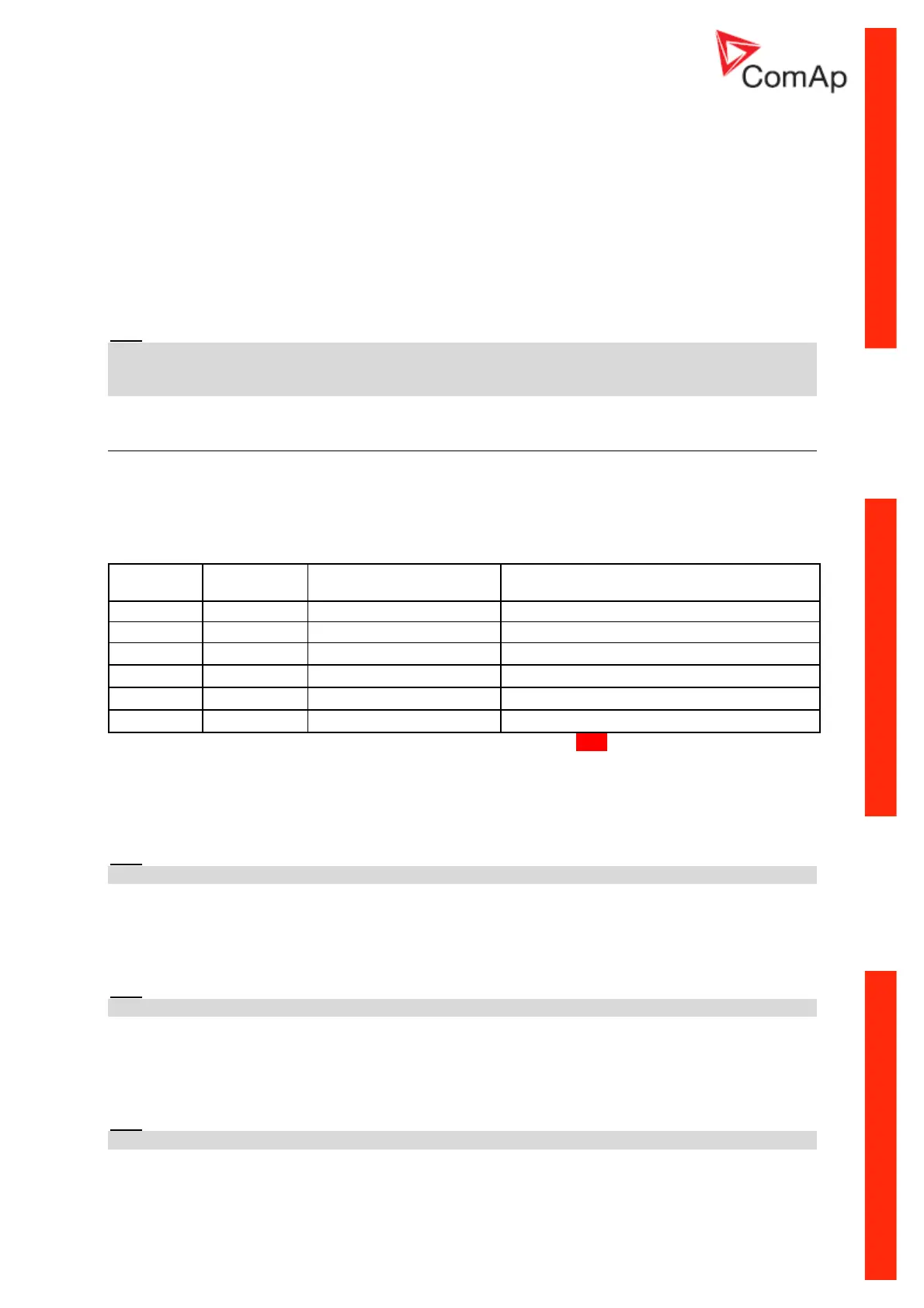
Main PID
The speed regulation loop uses three setpoint sets – one for unloaded within RPM window, one for
unloaded outside RPM window and one for loaded engine. Which setpoint set is used is defined by
binary input GCB and MCB Fdb and deviation of RPM from requested RPM.
Table 7
GCB state
> RPM window PID constants
OFF
OFF NO Speed gain, Speed int, Speed der
OFF
OFF YES Speed gain, Speed int w, Speed der w
ON
OFF NO Speed gain, Speed int, Speed der
ON
OFF YES Speed gain, Speed int w, Speed der w
OFF
ON - Load gain, Load int, Load der
ON
ON - Load control according Speed/Fuel Line
ECON4-ADV has even more sets of PID setpoint sets. See chapter xxxx
Speed gain [%]
Gain of the PID speed regulation loop.
Step: 0.1 %
Range: 0.0 – 200.0 %
Hint:
Setpoint is active for unloaded engine.
Speed int [%]
Integration of the PID speed regulation loop.
Step: 0.1 %
Range: 0.0 – 100.0 %
Hint:
Setpoint is active for unloaded engine.
Speed der [%]
Derivative part of the PID speed regulation loop.
Step: 0.1 %
Range: 0.0 – 100.0 %
Hint:
Setpoint is active for unloaded engine.
 Loading...
Loading...











