3.5.4.2 SS1 Delay with S-ramp Stop Profile
Context:
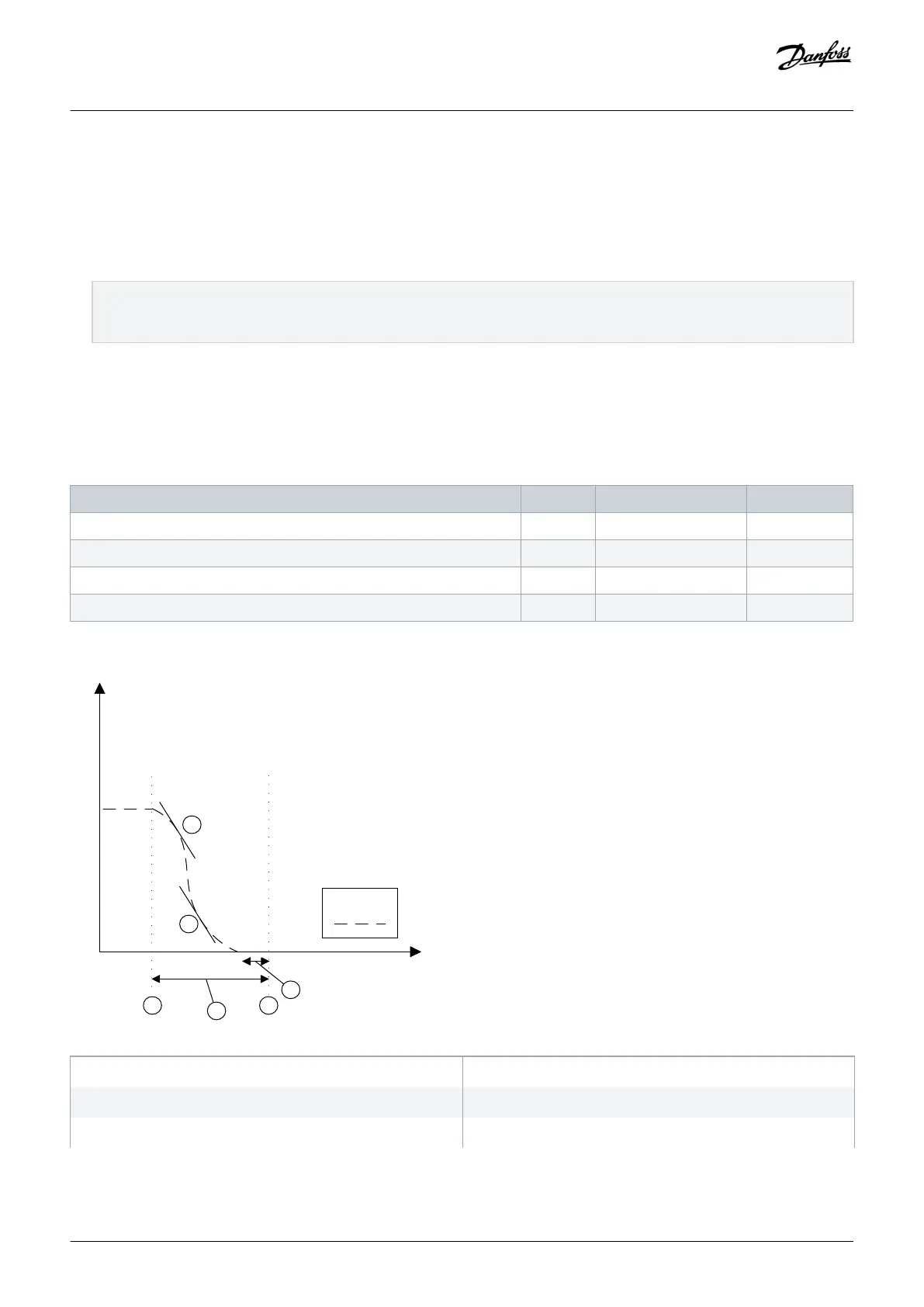
An S-ramp gives non-linear deceleration, compensating for jerks in the application.
Procedure
1. Define a speed profile by a delay (a worst-case delay from actual frequency to 0 speed) and a delay tolerance.
The safety relevant time, Delta T, allows the drive to come to a stop before STO is activated. Thus ensuring that the system is also
stopped before STO is activated. If a fault occurs, the drive does not come to a stop. It coasts after the time delay regardless of the
drive speed.
2. Define an S-ramp configuration, which achieves 0 speed within the delay.
3. Configure the S-Ramp ratio at deceleration start in parameter 42-48 S-ramp Ratio at Decel. Start and set parameter 42-49 S-ramp Ratio
at Decel. End for S-Ramp ratio at deceleration end.
Example:
Table 3: Parameters for SS1 Delay with S-ramp Stop Profile
Parameter Unit Range Default
Parameter 42-42 Delay Time s 0.1–3600.0 s 1.0 s
Parameter 42-43 Delta T % 0–50% 5%
Parameter 42-48 S-ramp Ratio at Decel. Start % 1–99 50
42-49 S-ramp Ratio at Decel. End % 1–99 50
A Actual frequency
2 Activation of STO
4 Parameter 42-43 Delta T
1 Activation of SS1 Ramp Delay
3 Parameter 42-42 Delay Time
5 Parameter 42-48 S-ramp Ratio at Decel. Start
Functions and Systems Overview
Installation Guide | VLT® Safety Option MCB 150/151
AQ279747441421en-000101 / 130R0292
24 | Danfoss A/S © 2018.09
 Loading...
Loading...