Control Mode of Operation ASDA-B2-F
6-14 September, 2015
6.3.5 Gain Adjustment of Speed Loop
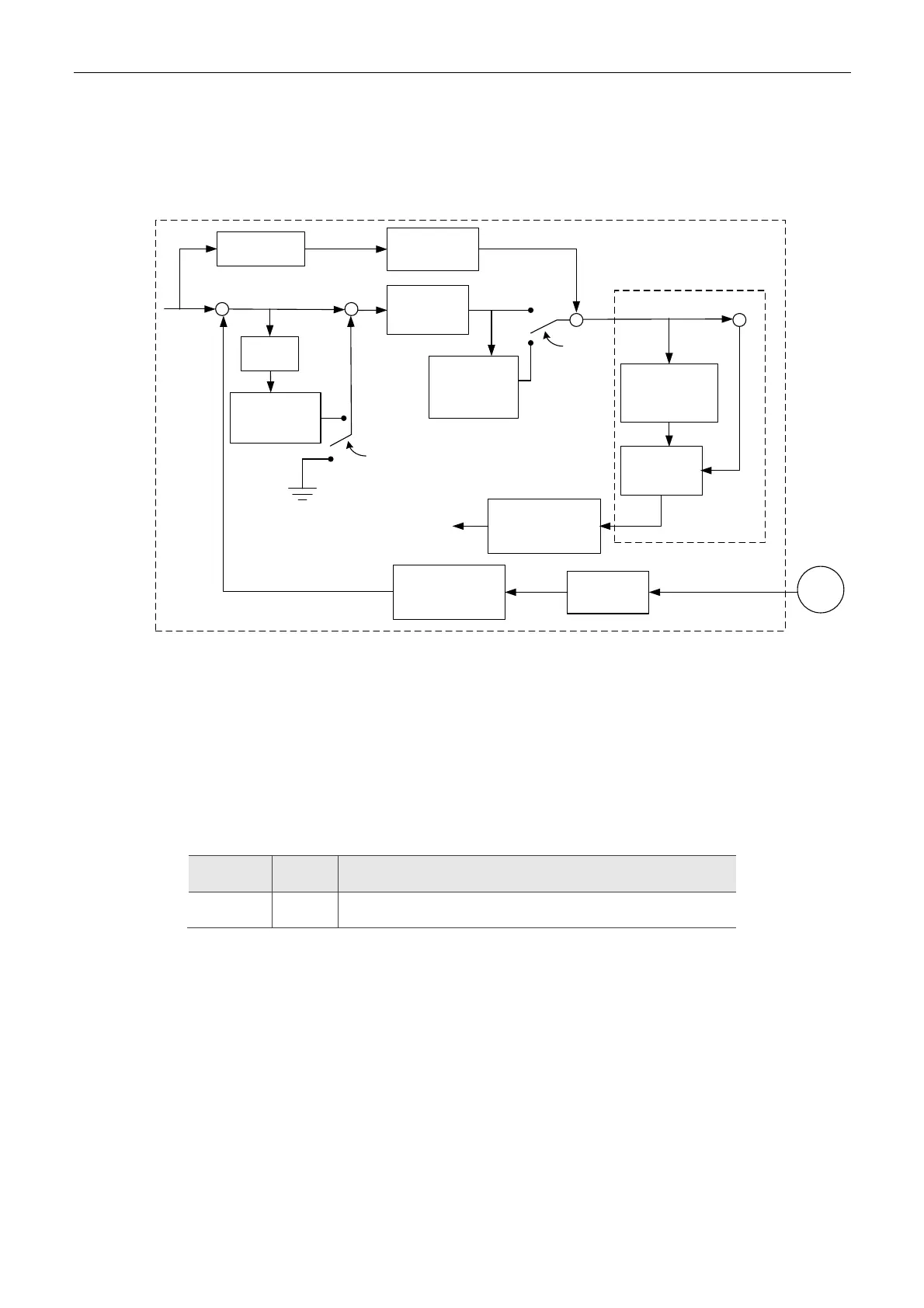
Here introduces the function of speed control unit. The following shows its structure:
Speed Control Unit
Gain Switching
and Switching
Selection
P2-27
Torque
Command
+
-
+
+
+
Speed Detection
Filter
P2-49
Torque Constant
Reciprocal
1/KT
Current
Command
Speed
Estimator
Motor Inertia
JM
System Inertia J
(1+P1-37)*JM
Switching Rate
of Speed Loop
Gain
P2-05
Integrator
Speed Integral
Compensation
P2-06
+
+
Speed Feed
Forward Gain
P2-07
Differentiator
Inertia Ratio and
Load Weight Ratio
to Servo Motor
P1-37
+
Gain Switching and
Switching Selection
P2-27
Speed Loop
Gain
P2-04
Encoder
Figure 6-8 Structure of Speed Loop Gain Adjustment
Many kinds of gain in speed control unit are adjustable. Two adjustment ways (manual and auto)
are provided for selection.
Manual: All parameters are set by users and all auto or auxiliary functions will be disabled in this
mode.
Auto: General load inertia estimation is provided. It can adjust the parameter automatically. Its
framework is divided into PI auto gain adjustment and PDFF auto gain adjustment.
Parameter P2-32 can be used to select the gain tuning method. (Please refer to Chapter 7 for
detailed description):
Parameter Abbr. Function
P2-32 AUT2 Tuning Mode Selection
Manual Mode
When P2-32 is set to 0, users can define speed loop gain (P2-04), speed integral compensation
(P2-06) and speed feed forward gain (P2-07). Function of each parameter is as the followings:
Speed loop gain: Increasing speed loop gain can enhance the response bandwidth of speed
loop.
Speed integral compensation: Increasing the speed integral compensation can increase the
low-frequency stiffness of speed loop and reduce the steady-state error as well as the phase
margin. However, the over high integral gain will cause the instability of the system.
Speed feed forward gain: It can decrease the deviation of phase delay.

 Loading...
Loading...





