ASDA-B2-F Control Mode of Operation
September, 2015 6-15
6
Relevant Parameters (Please refer to Chapter 7 for detailed description):
Parameter Abbr. Function
P2-04 KVP Speed Loop Gain
P2-06 KVI Speed Integral Compensation
P2-07 KVF Speed Feed Forward Gain
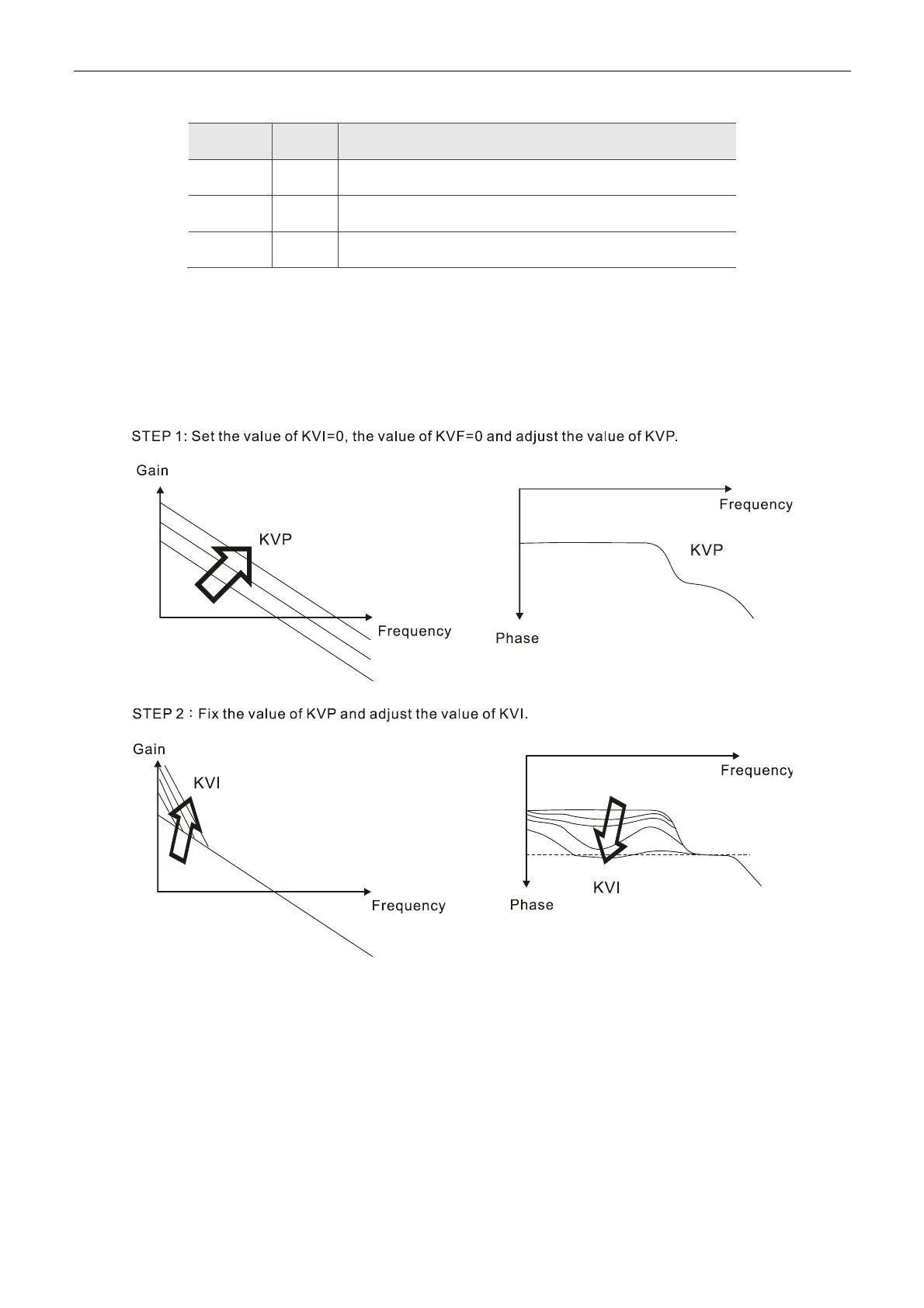
Theoretically, stepping response can be used to explain speed loop gain (KVP), speed integral
compensation (KVI) and speed feed forward gain (KVF). Descriptions of their basic principles are
provided from the aspects of frequency domain and time domain.
Frequency Domain

 Loading...
Loading...





