Control Mode of Operation ASDA-B2-F
6-16 September, 2015
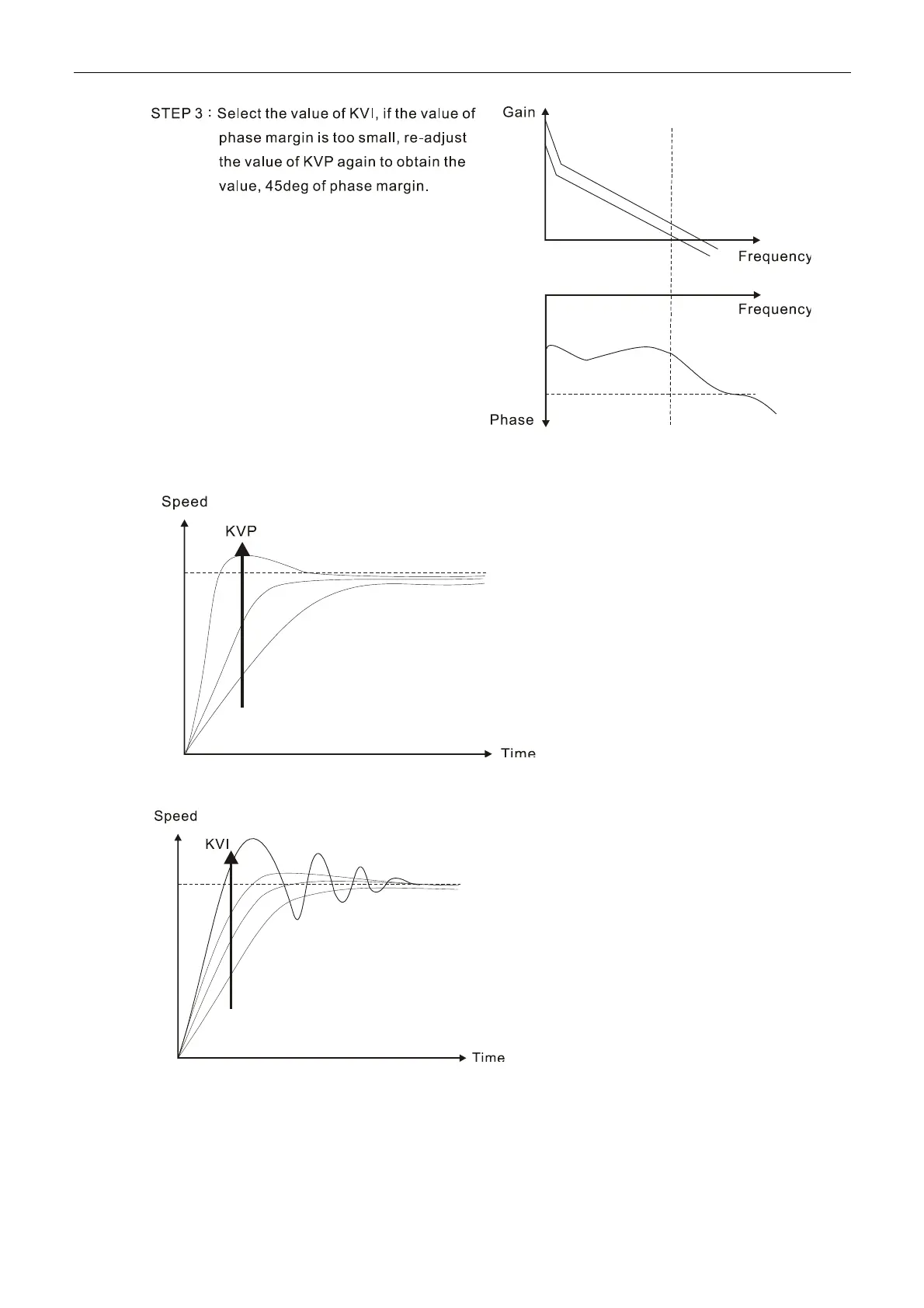
Time Domain
The bigger KVP value causes higher
bandwidth and shortens the rising time.
However, if the value is set to be too big, the
phase margin will be too small. To
steady-state following error, the result is not
as good as KVI. But it helps to reduce the
dynamic following error.
The bigger KVI value causes greater
low-frequency gain and shortens the time the
steady-state following error returns to zero.
However, the phase margin will dramatically
decrease as well. To steady-state following error,
it is very helpful but shows no benefit to dynamic
following error.

 Loading...
Loading...





