Troubleshooting ASDA-B2-F
9-14 September, 2015
9
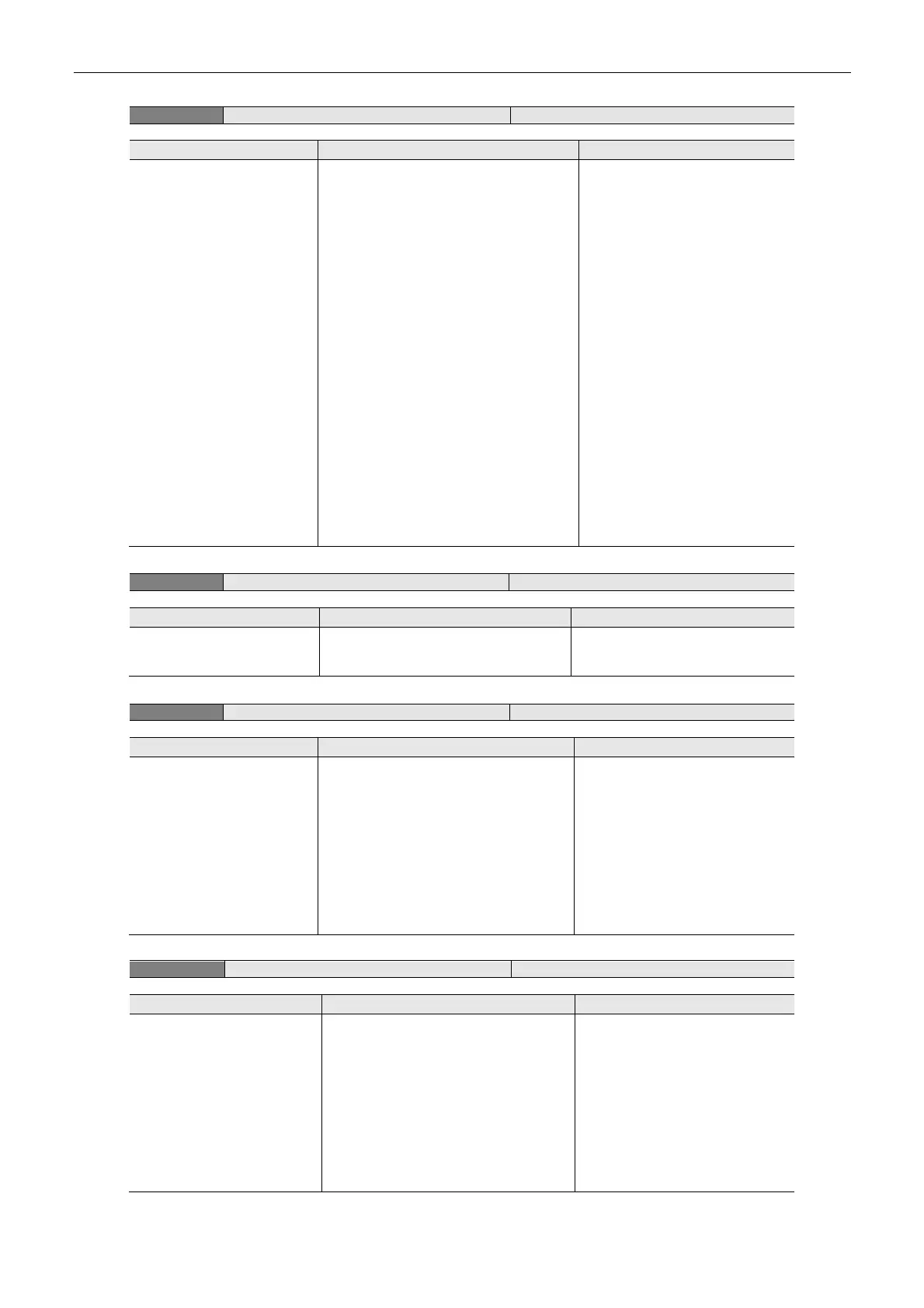
AL235
PR command overflows Conduct homing to clear this alarm
Causes Checking Method Corrective Actions
PR command overflows Incremental Type:
Continuous operation in one direction in
PR mode causes position feedback
register (FB_PUU) overflows. Thus, the
coordinate system cannot reflect the
correct position. If issuing the absolute
positioning command at this moment,
the error will occur.
Absolute Type:
If issuing the absolute positioning
command in the following situations, this
error will occur:
1. Feedback position register
(FB_PUU) overflows.
2. When P1-01.Z is modified, homing
has not been completed yet.
3. When electronic gear ratio (P1-44,
P1-45) is modified, homing has not
been completed yet.
4. Function of returning to the original
point is triggered and homing has
not completed yet.
5. AL060 and AL062 occur.
Conduct homing
AL245 PR positioning is over time
N/A
Causes Checking Method Corrective Actions
PR positioning is over time. N/A If this alarm occurs, please directly
send the servo drive back to Delta
without making any modification.
AL283 Forward software limit
Issue alarm reset to clear this alarm
Causes Checking Method Corrective Actions
Forward software limit Forward software limit is determined by
position command, not the actual
feedback position. That is because the
command always arrives first and then
the feedback. When the protection
function is activated, the actual position
might not exceed the limit yet.
Therefore, setting an appropriate
decelerating time could satisfy the
demand. Please refer to the description
of P5-03.
Issue alarm reset
AL285 Reverse software limit
Issue alarm reset to clear this alarm
Causes Checking Method Corrective Actions
Reverse software limit Reverse software limit is determined by
position command, not the actual
feedback position. That is because the
command always arrives first and then
the feedback. When the protection
function is activated, the actual position
might not exceed the limit yet.
Therefore, setting an appropriate
decelerating time could satisfy the
demand. Please refer to the description
of P5-03.
Issue alarm reset
 Loading...
Loading...






