Chapter 12 Description of Parameter SettingsC2000
12.1-01-7
JOG Deceleration Time
Default: 10.00
The default of motor drive with 30HP
and above: 60.00 / 60.0
Settings Pr.01-45=0: 0.00–600.00 seconds
Pr.01-45=1: 0.00–6000.0 seconds
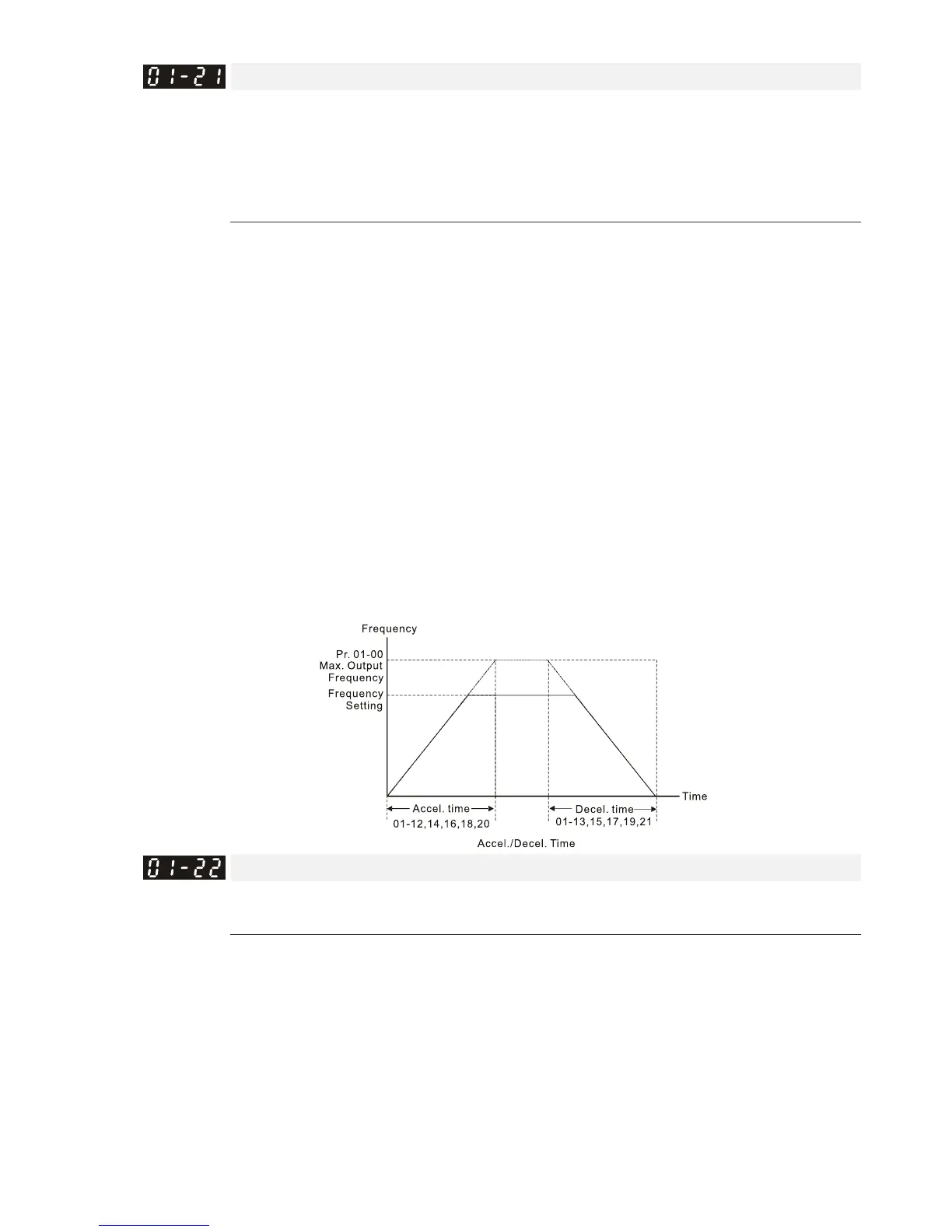
Use the acceleration time to determine the time required for the AC motor drive to accelerate
from 0.00Hz to maximum output frequency (Pr. 01-00).
The acceleration and deceleration time are invalid when using Pr. 01-44 Auto-acceleration and
Auto-deceleration Setting.
Select the acceleration and deceleration time 1, 2, 3, and 4 with the multi-function input terminals
settings. The defaults are acceleration and deceleration time 1.
With the enabled torque limits and stall prevention functions, the actual acceleration and
deceleration time are longer than the above action time.
Note that setting the acceleration time too short may trigger the protection function (Pr. 06-03
Over-current Stall Prevention during Acceleration or Pr. 06-01 Over-voltage Stall Prevention).
Note that setting the acceleration time too short may cause motor damage or trigger drive
protection due to over-current during acceleration.
Note that setting the deceleration time too short may cause motor damage or trigger drive
protection due to over-current during deceleration or over-voltage.
Use suitable brake resistor (refer to Chapter 07 Optional Accessories) to decelerate in a short
time and prevent over-voltage.
When you enable Pr. 01-24–Pr.01-27, the actual acceleration and deceleration time are longer
than the setting.
JOG Frequency
Default: 6.00
Settings 0.00–599.00 Hz
You can use both the external terminal JOG and F1 key on the optional keypad KPC-CC01 to set
the JOG function. When the JOG command is ON, the AC motor drive accelerates from 0 Hz to
the JOG frequency (Pr. 01-22). When the JOG command is OFF, the AC motor drive decelerates
from the JOG frequency to stop. The JOG acceleration and deceleration time (Pr. 01-20, Pr.
01-21) are the time to accelerate from 0.00 Hz to JOG frequency (Pr. 01-22).
You cannot execute the JOG command when the AC motor drive is running. When the JOG
command is executing, other operation commands are invalid.
 Loading...
Loading...





