Chapter 15 CANopen Overview C2000
15-23
Index
2026-01
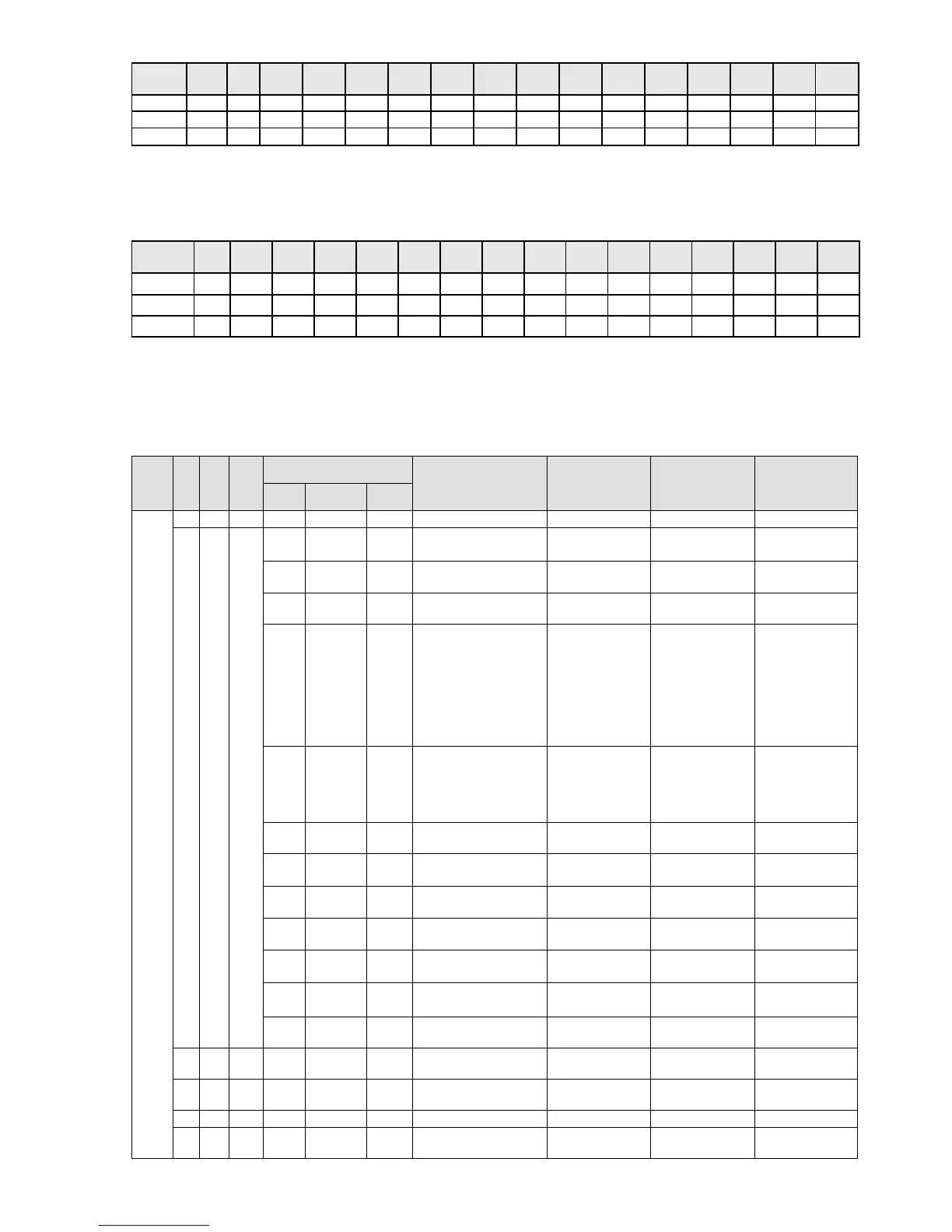
bit0 bit1 bit2 bit3 bit4 bit5 bit6 bit7 bit8 bit9 bit10 bit11 bit12 bit13 bit14 bit15
1 FWD REV MI1 MI2 MI3 MI4 MI5 MI6 MI7 MI8
2 MI10 MI11 MI12 MI13 MI14 MI15
3 MI10 MI11 MI12 MI13
1: Control broad I/O (Standard)
2: Add external card, EMC-D611A
3: Add external card, EMC-D42A
Index
2026-41
bit0 bit1 bit2 bit3 bit4 bit5 bit6 bit7 bit8 bit9 bit10 bit11 bit12 bit13 bit14 bit15
1 RY1 RY2 MO1 MO2
2 MO10 MO11
3 RY10 RY11 RY12 RY13 RY14 RY15
1: Control broad I/O (Standard)
2: Add external card, EMC-D42A
3: Add external card, EMC-R6AA
Delta Standard Mode (New definition)
Index sub R/W Size
Descriptions
Speed Mode Position Mode Home Mode Torque Mode
bit DefinitionPriority
2060h
00h R U8
0: Stop Homing
01h RW U16
0
Ack 4
0: fcmd =0
1: fcmd = Fset(Fpid)
Pulse 1: Position
control
Pulse 1: Return
to home
1
Dir 4
0: FWD run command
1: REV run command
2
0: Relative move
1: Absolute move
3
Halt 3
0: drive run till target
speed is attained
1: drive stop by
declaration setting
The torque target
of internal
decoding is set
as 0, but the
display of outside
torque target will
remain its outside
setting.
4
Hold 4
0: drive run till target
speed is attained
1: frequency
stop at current
frequency
5
JOG 4
0: JOG OFF
Pulse 1: JOG RUN
6
Qstop 2 Quick Stop Quick Stop Quick Stop Quick Stop
7
Power 1
0: Power OFF
1: Power ON
0: Power OFF
1: Power ON
0: Power OFF
1: Power ON
0: Power OFF
1: Power ON
8
Reserved
9
Ext Cmd2 4
0->1: Absolute
position cleared
0->1: Absolute
position cleared
0->1: Absolute
position cleared
0->1: Absolute
position cleared
10–14
Reserved
15
RST
Pulse 1: Fault code
cleared
Pulse 1: Fault
code cleared
Pulse 1: Fault
code cleared
Pulse 1: Fault
code cleared
02h RW U16
Mode
Cmd
0: Speed mode
1: P2P position
mode
3: Home mode 2: Torque mode
03h RW U16
Speed command
(unsigned decimal)
04h RW U16
05h RW S32
Position
command

 Loading...
Loading...




