Chapter 16 PLC Function ApplicationsC2000
16-137
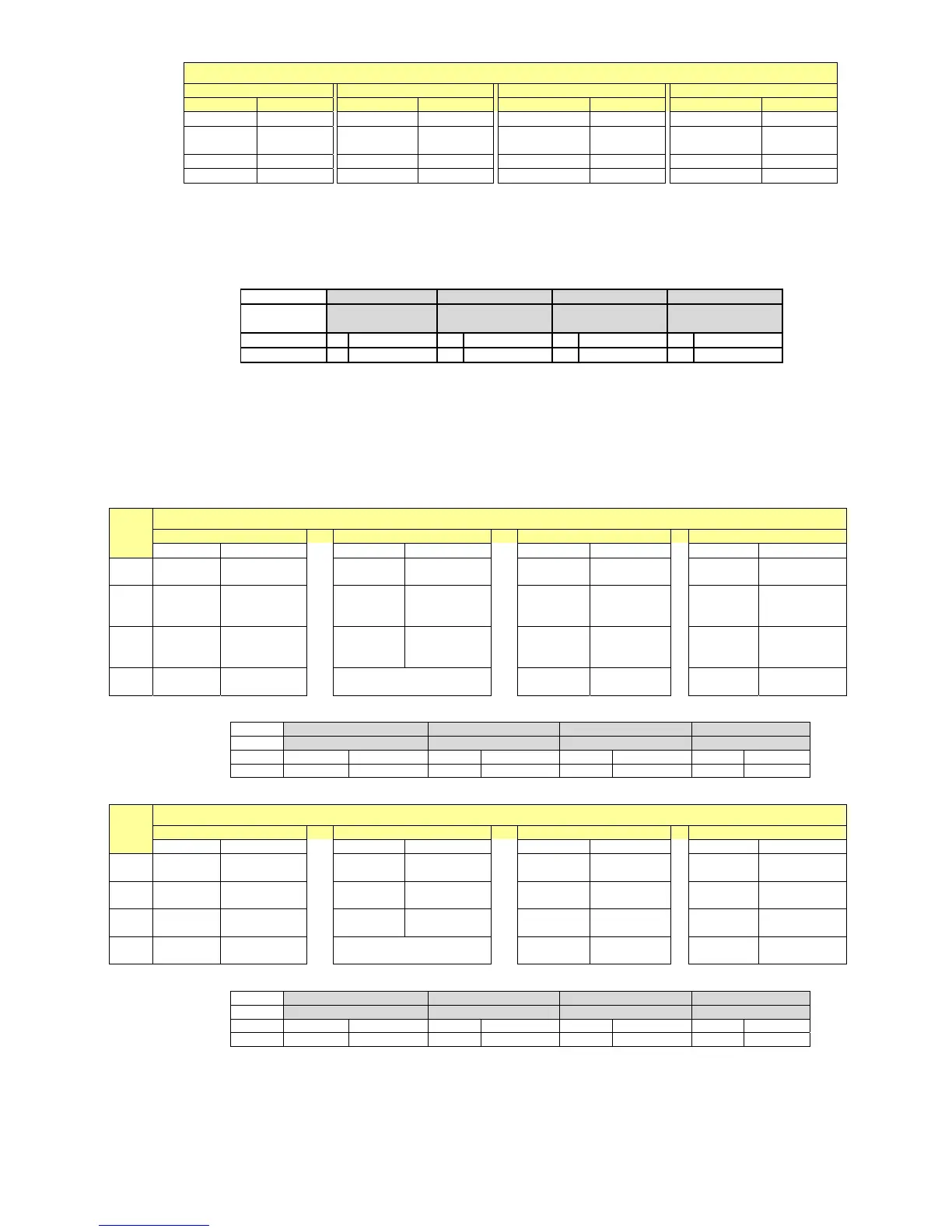
RXPDO
PDO4 (Torque) PDO3 (Position) PDO2 (Remote I/O) PDO1 (Speed)
Description Special D Description Special D Description Special D Description Special D
Mode word D2009+100*n Mode word D2009+100*n Slave device DI D2026+100*n Mode word D2009+100*n
Actual torque D2018+100*n
Actual position
D2022+100*n
D2023+100*n
Slave device AI1 D2028+100*n
Actual frequency D2013+100*n
Actual mode D2011+100*n Actual mode D2011+100*n Slave device AI2 D2029+100*n
Slave device AI3 D2030+100*n
Because usage requires only simple to open the corresponding PDO, where TXPDO employs
D2034+100*n settings and RXPDO employs D2067+100*n settings.
These two special D areas are defined as follows:
PDO4 PDO3 PDO2 PDO1
Default
definition
Torque Position Remote I/O Speed
bit 15 14–12 11 10–8 7 6–4 3 2–0
Definition En Length En Length En Length En Length
En: indicates whether PDO is used
Length: indicates mapping of several variables
In a simple example, if we want to control a C2000 slave device and make it to operate in speed
mode, we only have to make the following settings:
D2034+100*n =000Ah
Length:
TX PDO
PDO4 PDO3 PDO2 PDO1
Description Special D Description Special D Description Special D Description Special D
1 Controller
Word
D2008+100*n Controller
Word
D2008+100*n Slave
device DO
D2027+100*n Controller
Word
D2008+100*n
2 Target
torque
D2017+100*n Target D2020+100*n
D2021+100*n
Slave
device
AO1
D2031+100*n Target
speed
D2012+100*n
3 Control
method
D2010+100*n Control
method
D2010+100*n Slave
device
AO2
D2032+100*n
4
Slave device
AO3
D2033+100*n
PDO4 PDO3 PDO2 PDO1
Definition Torque Position Remote I/O Speed
bit 15 14–12 11 10–8 7 6–4 3 2–0
Definition 0 0 0 0 0 0 1 2
D2067+100*n =000Ah
Length:
TX PDO
PDO4 PDO3 PDO2 PDO1
Description Special D Description Special D Description Special D Description Special D
1 Controller
Word
D2009+100*n Controller
Word
D2009+100*n Slave
device DI
D2026+100*n Controller
Word
D2009+100*n
2 Actual
torque
D2018+100*n Actual
position
D2022+100*n
D2023+100*n
Slave
device AI1
D2028+100*n Actual
frequency
D2013+100*n
3 Actual
mode
D2011+100*n Actual
mode
D2011+100*n Slave
device AI2
D2029+100*n
4
Slave device
AI3
D2030+100*n
PDO4 PDO3 PDO2 PDO1
Definition Torque Position Remote I/O Speed
bit 15 14–12 11 10–8 7 6–4 3 2–0
Definition 0 0 0 0 0 0 1 2
Switch the PLC to Run after completing settings. Now wait for successful initialization of CANopen
(M1059 = 1 and M1061 = 0), and then initiate CANopen memory mapping (M1034 = 1). The
control word and frequency command will now automatically refresh to the corresponding slave
device (D2008+n*100 and D2012+n*100), and the slave device's status word and currently

 Loading...
Loading...




