Cornering behaviour
When the Adaptive Cruise Control system detects
that the motorcycle is leaning (e.g. in bends), it can
slow down the speed of the bike to ensure greater
this is done within the limits of the system.
The amount of deceleration is a function of the
leaning angle.
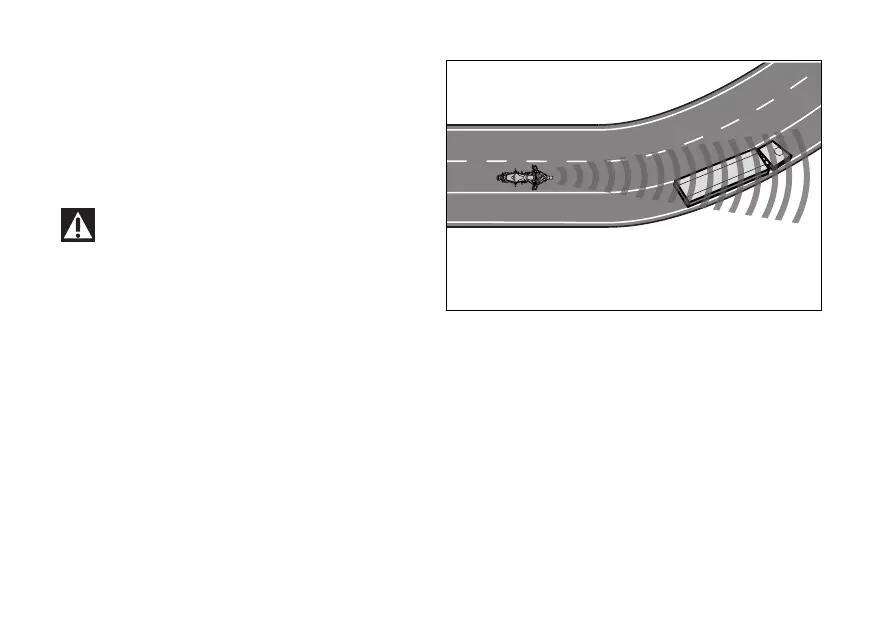
When entering or exiting a bend, vehicles could
be detected late or detection be disturbed: the
system may behave unexpectedly, suddenly
accelerating or braking. Similar events may more
likely occur if the radius of the bend is narrow or
variable. For example, in a bend, the vehicle in front
might go out of the radar field of view: in a case like
this, the Adaptive Cruise Control might accelerate
without the rider expecting it. In addition, when
cornering, the Adaptive Cruise Control may react to a
vehicle located in an adjacent lane and may brake. It
is always possible to prevent or stop this action by
manually acting on the
Stationary vehicles
The Adaptive Cruise Control system only detects
moving vehicles. For example, it is able to recognise
and react to a detected vehicle while it is stopping
(albeit with the limits previously specified), but it is
not able to recognise and react to vehicles parked or
already stopped on the road (e.g. vehicles stopped in
a line or queue because of In this case, the
rider must slow down the motorcycle by properly
acting on the brakes.
In general, the system does not react to stationary
objects (e.g. dividers, motorway toll booths) or
Fig 118
152