M-Max Series adjustable frequency drive
MN04020002E
For more information visit: www.eaton.com 35
February 2010
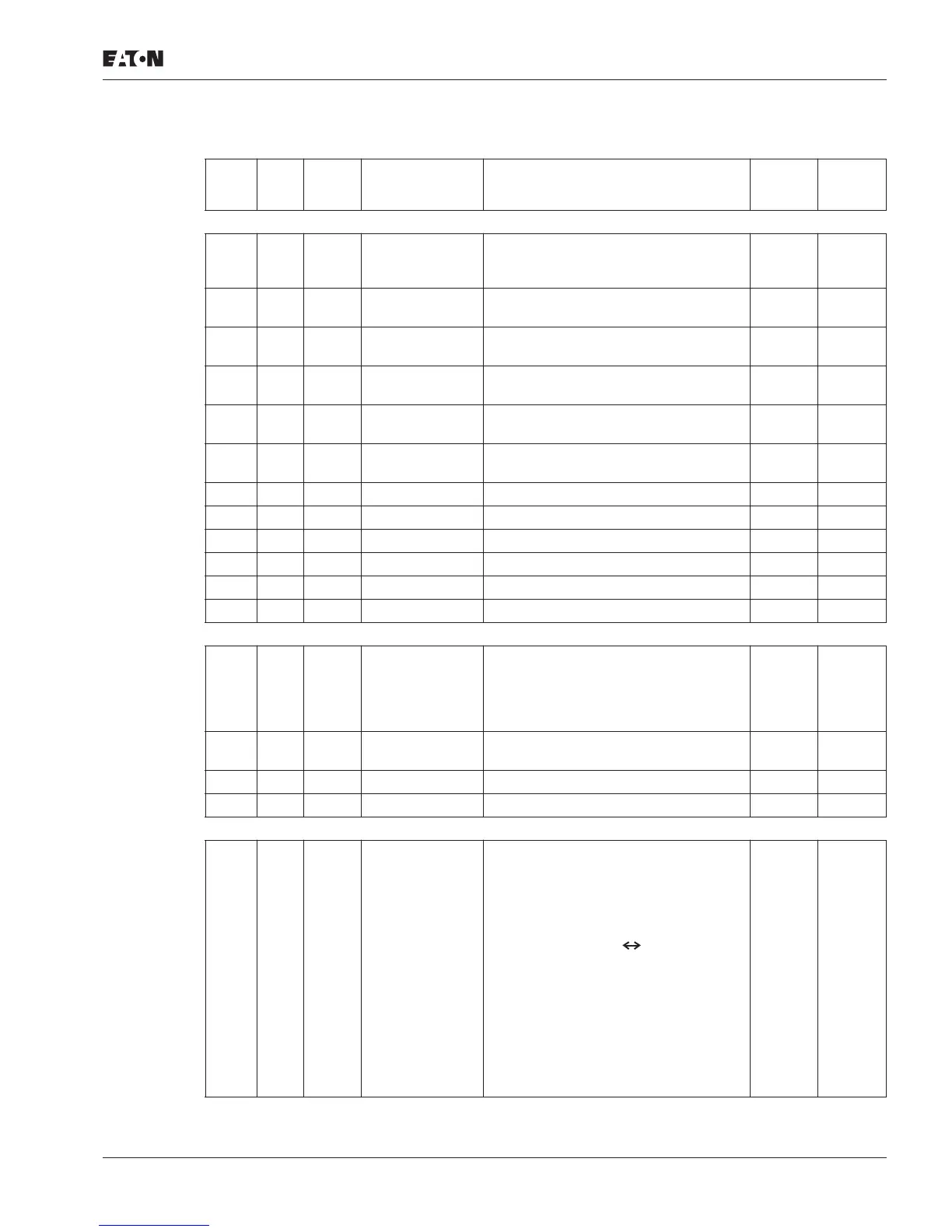
Table 11: All Parameters (continued)
PNU ID
Access
Right
RUN Designation Value Range
Factory
Setting
User
Setting
Digital Input (continued)
P3.26 1413 ✓ First/second
source for I/O
reference value
like P3.2 0
P3.27 1414 ✓ Second
parameter set
like P3.2 0
P3.28 1415 ✓ Field bus pass
through
like P3.2 0
P3.29 1416 ✓ Output trigger
counter value 1
0 – 65535 0
P3.30 1417 ✓ Output trigger
counter value 2
0 – 65535 0
P3.31 1418 ✓ DI1 Logic 0 = N/O
1 = N/C
0
P3.32 1419 ✓ DI2 Logic Like P3.31 0
P3.33 1420 ✓ DI3 Logic Like P3.31 0
P3.34 1421 ✓ DI4 Logic Like P3.31 0
P3.35 1422 ✓ DI5 Logic Like P3.31 0
P3.36 1423 ✓ DI6 Logic Like P3.31 0
P3.37 1480 ✓ Hand mode 0-6 0
Analog Output
P4.1 307 ✓ AO signal 0 = Deactivated
1 = Output frequency (0 – f
max
)
2 = Output current (0 – I
N
Motor
)
3 = Torque (0 – M
N
)
4 = PID controller, output
1
P4.2 310 ✓ AO, minimum
value
0 = 0 mA
1 = 4 mA
0
P4.3 1456 ✓ AO, gain 0.00 – 200.00% 100.00
P4.4 1477 ✓ AO, filter time 0.00 – 10.00s 0.1
Digital Output
P5.1 313 ✓ RO1 signal 0 = Deactivated
1 = Ready to start (READY)
2 = Operation (RUN)
3 = Fault signal (FAULT)
4 = Error message (inverted)
5 = Warning (ALARM)
6 = Reversing (FWD REV)
7 = Reference frequency reached
8 = Motor controller active
9 = Zero frequency
10 = Frequency monitoring 1
11 = Frequency monitoring 2
12 = PID monitoring
13 = Overtemperature-monitoring
14 = Overcurrent control active
15 = Overvoltage control active
2

 Loading...
Loading...



