Even in the case where the parameterisation is transferred to the Motion Terminal controller by the
higher-order controller at every system start, this parameterisation should additionally be saved once,
as persistent data, on the Motion Terminal controller. Otherwise, the teach-in data determined during
a teach-in run or the reference values for a Motion App may be lost (
è
3.7.6 Validity of teach-in data
based on parameter changes).
4.6 Changing an active parameter set
Changing the active parameter set is controlled using the channel "valve settings" (channel = 15)
(
è
3.5.4.1 Structure of the process data in transfer mode). The “Value” section contains the number
of the parameter set to be activated.
4.6.1
Requirements
– The Motion Terminal boot procedure is completed.
–
There are no Motion Apps currently running on the valve in question (valve state ≠ "2" (running)).
4.6.2
Sequence
To set the active parameter set, the following settings must be selected in the transfer mode:
– Operating mode of the valve (valve mode): 63 (transfer mode active) (PDO byte 0, bits 5 … 0 =>
111111
2
)
– Channel (channel): 15 (valve settings) (PDO byte 1, bits 4 … 0 => 01111
2
)
– Transfer control (transfer control): 1 (download) (PDO byte 1, bits 7 … 5 => 001
2
)
–
Addressing of data transfer (addressed target): 0 (PDO byte 2 => 0)
– Index (index): 1 (PDO byte 3 => 1) -
–
Value (value): number of the parameter set that should be actively switched (PDO bytes 5 … 4)
4.6.3 Example
Parameter set 4 is to be selected as the active parameter set.
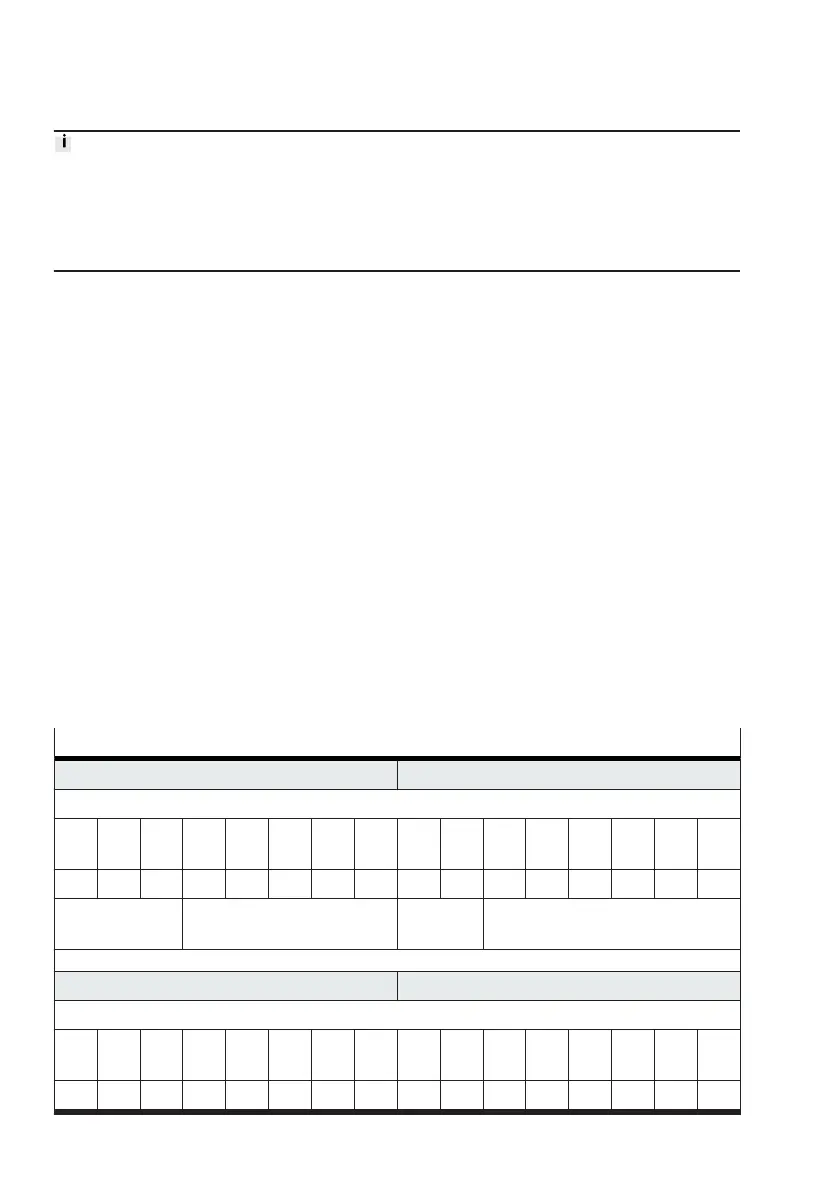
Example of output data for changing the active parameter set
PDO byte 1 PDO byte 0
Command
Bit
7
Bit
6
Bit
5
Bit
4
Bit
3
Bit
2
Bit
1
Bit
0
Bit
7
Bit
6
Bit
5
Bit
4
Bit
3
Bit
2
Bit
1
Bit
0
0 0 1 0 1 1 1 1 ... ... 1 1 1 1 1 1
transfer control
= 1 (download)
channel = 15 (valve settings) – valve mode = 63 (transfer mode)
PDO byte 3 PDO byte 2
Parameter
Bit
7
Bit
6
Bit
5
Bit
4
Bit
3
Bit
2
Bit
1
Bit
0
Bit
7
Bit
6
Bit
5
Bit
4
Bit
3
Bit
2
Bit
1
Bit
0
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0