Mac OS
Check the Installation of CH340
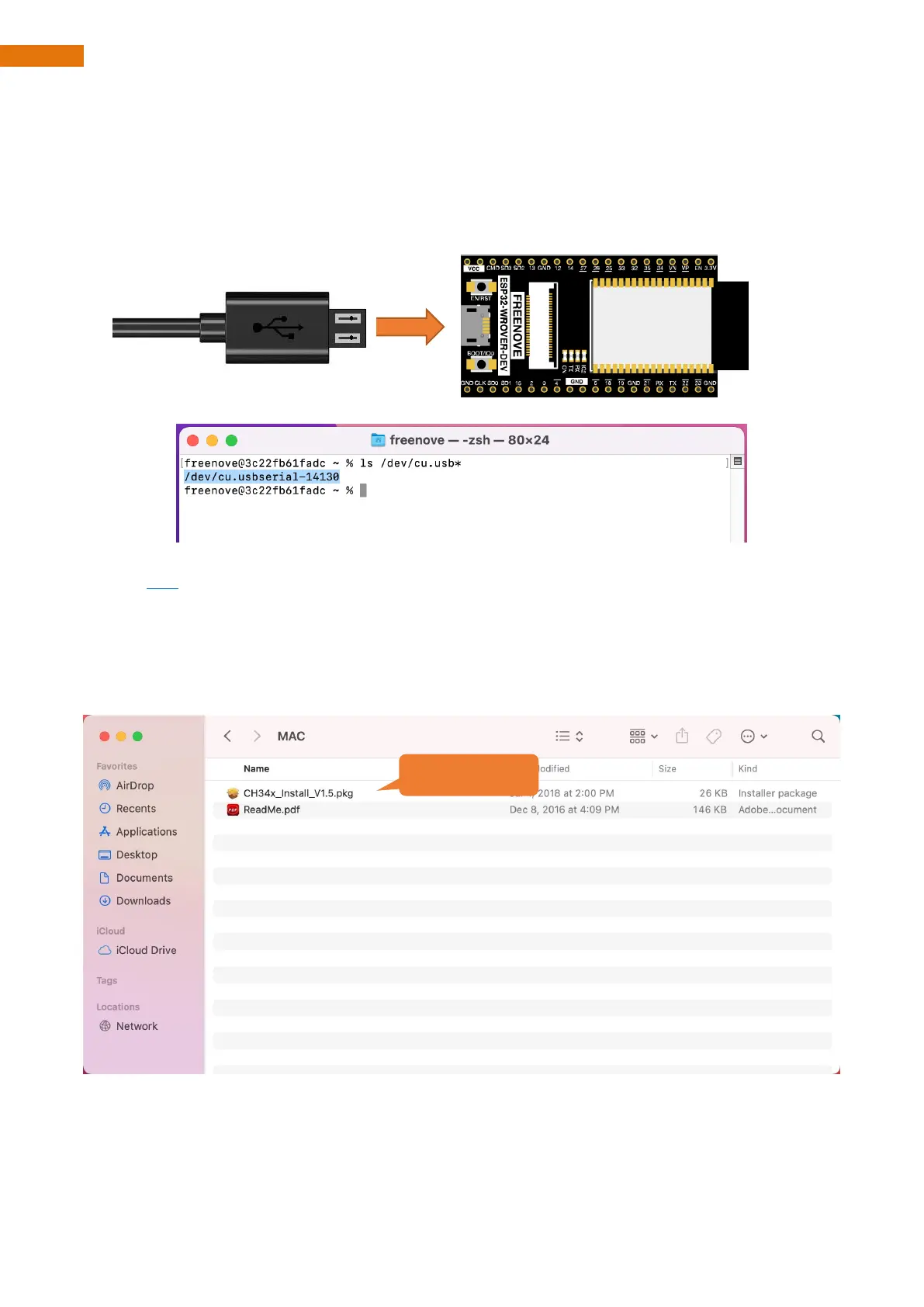
Connect esp32 to your computer with a USB cable.
Open Terminal of Mac OS, and type in the command ls /dev/cu.usb*
If your Terminal prints the message similar to the above, then your computer has installed the CH340. You
can click here to move to the next step.
Otherwise, please continue with the following the steps.
Install CH340
If you would not like to download the installation package, you can open
“Freenove_Robot_Dog_Kit_for_ESP32/CH340”. We have prepared the installation package.
Open the folder “Freenove_Robot_Dog_Kit_for_ESP32/CH340/MAC/”