6. Control Functions and Parameter Settings
6-31
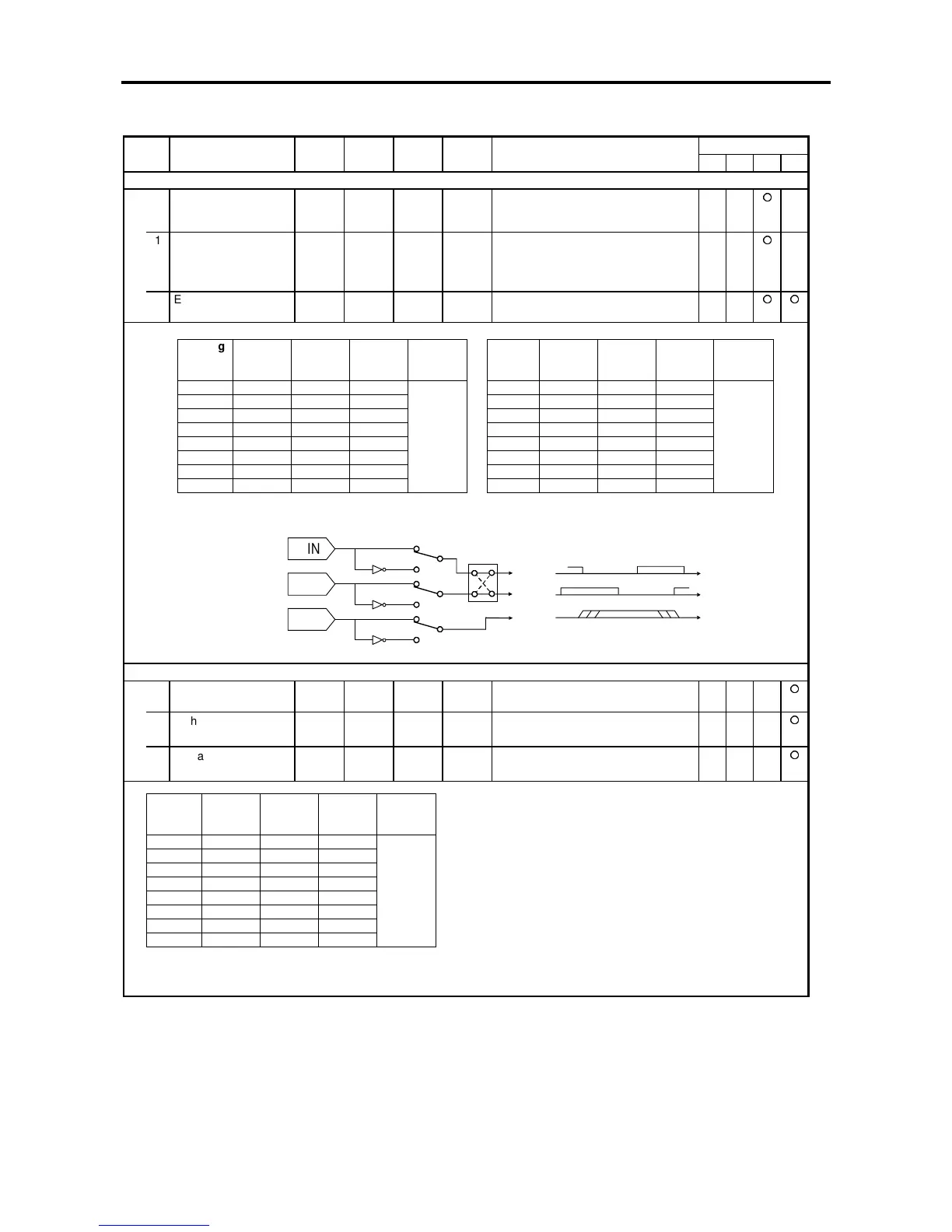
Block-C parameters (H/W optional functions) list
ApplicationNo. Parameter Unit Default Min. Max. Function
ST V/f VEC PM
C50 – Encoder setting
0 Encoder pulse divided
output
4. 1. 1024. The pulses received from the encoder
can be divided and output through
PAOUT and PBOUT
1 Encoder output pulse
type selection
1. 1. 2. = 1: 2-phase input
= 2: 1-phase input
In vector control with sensor mode,
set this parameter and B01-8 as well
2 Encoder ABZ pulse
type selection
0. 0. 15. Set values according following table
A-IN1
B-IN1
Reverse
AB interchange
During CCW rotation
A
Z
B
Z-IN
C51 – Encoder setting (PM)
0 Encoder UVW pulse
type selection
-007.
Set a value according the table shown
below
1
Z phase
→
U phase
winding phase angle
deg 0.0 0.0 359.9 Electrical angle from Z phase to U
winding
2
Z phase
→
U phase
signal phase angle
deg 0.0 0.0 359.9 Electrical angle from Z phase to U
signal
Setting
No.
A-IN
forward/
reverse
B-IN
forward/
reverse
Z-IN
forward/
reverse
AB
inter-
change
Setting
No.
A-IN
forward/
reverse
B-IN
forward/
reverse
Z-IN
forward/
reverse
AB inter-
change
0--- 8---
1 Reverse - - 9 Reverse - -
2 - Reverse - 10 - Reverse -
3 Reverse Reverse - 11 Reverse Reverse -
4 - - Reverse 12 - - Reverse
5 Reverse - Reverse 13 Reverse - Reverse
6 - Reverse Reverse 14 - Reverse Reverse
7 Reverse Reverse Reverse
No inter-
change
15 Reverse Reverse Reverse
AB inter-
change
Setting
No.
U-IN
forward/
reverse
V-IN
forward/
reverse
W-IN
forward/
reverse
UV inter-
change
0- - -
1 Reverse - -
2-Reverse-
3 Reverse Reverse -
4 - - Reverse
5 Reverse - Reverse
6 - Reverse Reverse
7 Reverse Reverse Reverse
No inter-
change