AGL50-EV 31
if the deceleration ramp is too slow, as compared to the re-aligning distance, the lift car could stop after the oor level.
If acceleration and/or deceleration ramps are too fast, the drive may reach the output current limit. In this case, the drive
will automatically clamp the current to a safe value, with a resulting loss of output torque. If the drive remains in limit
condition for the time specied by the parameter P.181 - Clamp alm HldOff (default setting is 1 second), an alarm will
be issued (“LF - Limiter fault”) and the lift sequence will be aborted. It is strongly recommended not to operate the drive
in current limit, since the desired speed prole cannot be achieved in that case, resulting in undesired oscillations. If the
drive reaches the current limit during the acceleration or deceleration phases, it is advised to slow down the ramps, until
the limit condition is avoided.
7.3.2 Short Floor Function
Sometimes, the space between adjacent oors is not constant, and there is one oor that may be nearer to the next one.
That situation is normally referred as “Short Floor”. It could happen that due to the reduced distance, the lift is required
to decelerate to the leveling speed, when the acceleration ramp to normal speed is still in progress. This will lengthen
the approaching phase, unless countermeasures are taken.
The drive is able to detect a Short Floor, by looking at the sequence.
The ag “ShortFloorFl” is set if the deceleration command is given during the acceleration phase.
I.007 Ramp sel 1 src = “[25] ShortFloorFl”
The ag is reset when the stop command is given, or when the sequence is aborted.
“ShortFloorFl” is default used to control the short oor, using the second set of ramps.
The regulation of the parameters from S.240 to S. 245 allows to dene the area to be covered before reaching the oor.
In case of short oor, if the lift overcomes the oor it means that the lift speed was too high and it is therefore necessary to
increase the jerk values (parameters S.242, S.243, S.244). If the plant works for a too long time with a low speed before
reaching the oor, the jerk values have to be decreased (parameters S.242, S.243, S.244).
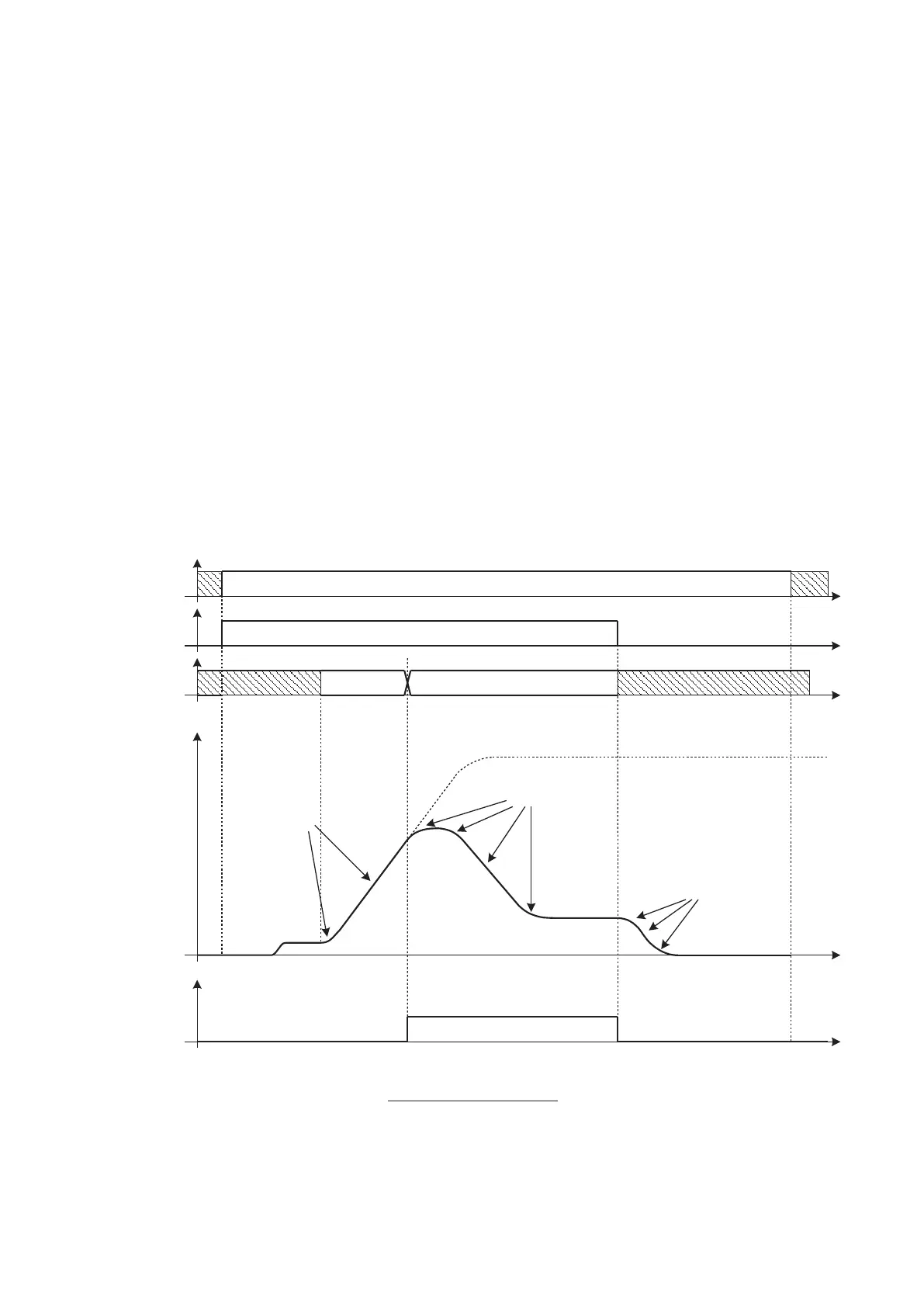
A typical short oor sequence is reported in Fig. 7.5 .
10
High speed setpoint
Leveling speed
Smooth start speed
Ramp set 1
Ramp set 2
Ramp set 1
I.000 Enable
I.001 Run Fwd
XOR
I.002 Run Rev
I.003 ... I.006
Freq Sel 1...4
D.007 Actual
speed
(Motor speed)
I.007 Ramp sel1src =
[25] ShortfloorFl
Fig. 7.5 – Short oor sequence
Ramp references: 1 S.240 Jerk acc ini 2 4 S.243 Jerk dec ini 2
2 S.241 Acceleration 2 5 S.244 Deceleration 2
3 S.242 Jerk acc end 2 6 S.245 Jerk dec end 2

 Loading...
Loading...