Deutsch
162 AGy -L
10
Beschleunigung
5 6 7
a
b
b
a
P.440 Freq Sw 1
S.201 Soll Freq 1 (F.101)
S.200 Soll Freq 0 (F.100)
Verzoegerung (**)
Ruck Verz Anf (**)
Ruck Besch End (**)
Ruck Besch End (**)
Ruck Verz Anf (**)
Verzoegerung (**)
I.000 Enable von
I.003 ... I.006
Freq Sel 1...4
von
[51] Schuetz(*)
[45] DC
Bremsung (*)
(Motoren)
[55] Lift start (*)
(*): Siehe 7.2.1
(**) S.230 ... S.245
[54] Brem.
Schuetz (*)
I.001 Run
Fwd/CW von
XOR
I.002 Run
Rev/CCW von
d.007 Istwert
Drehzahl
(Motordrehzahl)
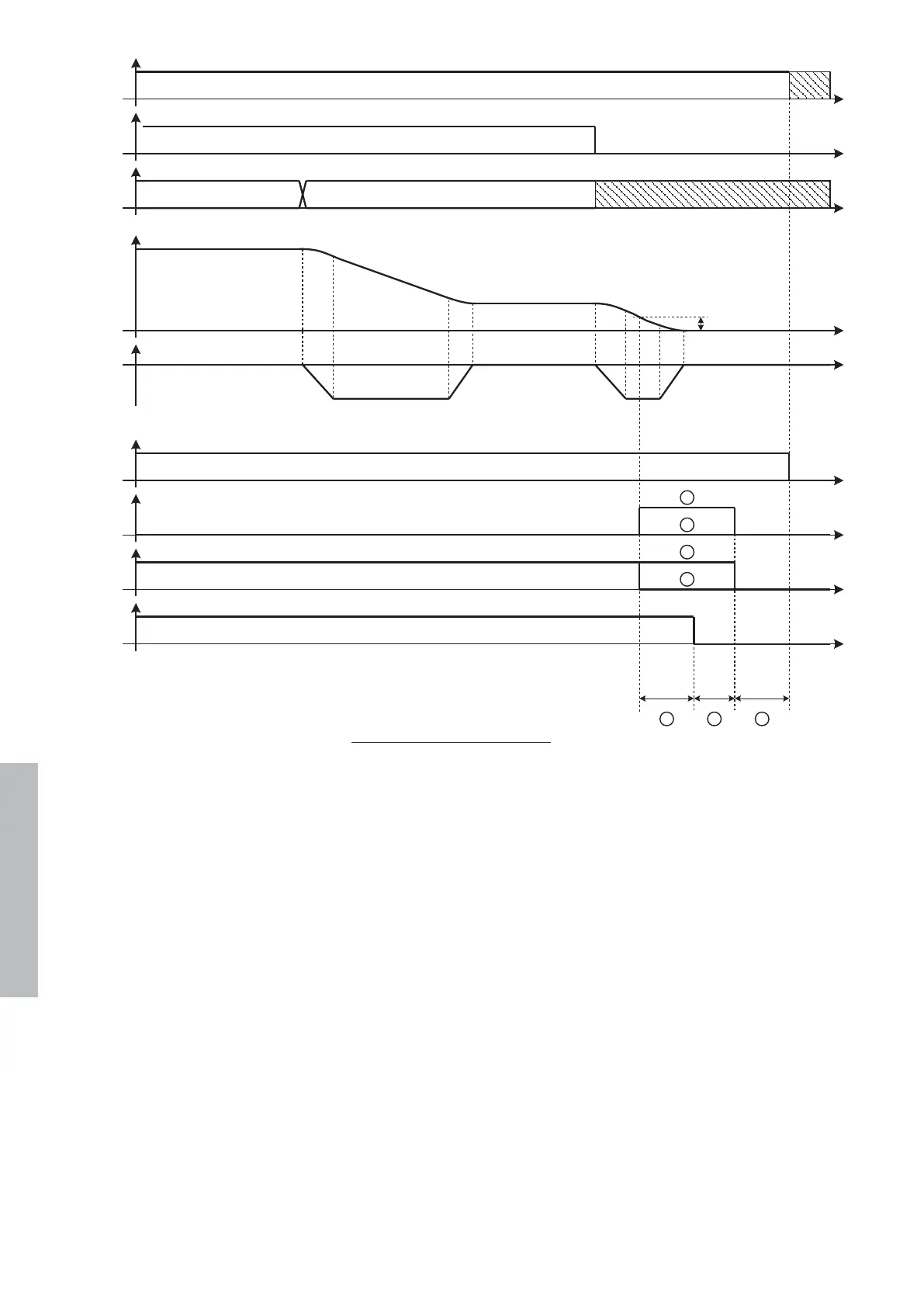
Abb. 7.3 – Detaillierte Haltesequenz
a) S.260 Lift Stop Modus = [0] DC-Brem.Stop (Voreinstellung)
b) S.260 Lift Stop Modus = [1] Normal Stop
7.2.1 Spezifische Digitalausgangsfunktionen für Aufzüge
Auf den Antriebs-Digitalausgängen können verschiedene spezifische Funktionen programmiert werden, um die Korrektheit
der Liftsequenz zu kontrollieren und das Zusammenspiel mit dem externen Sequencer zu verbessern. Im Folgenden wird
eine Reihe nützlicher Funktionen für Aufzugsanwendungen aufgeführt.
Programmierungscode. DO Funktionsbeschreibung
[0] Antrieb rdy TRUE, wenn der Antrieb zur Annahme eines gültigen RUN-Befehls bereit ist. Das heißt, dass sich
der Antrieb nicht im Alarmzustand befindet, der Vorladungsprozess des DC Link abgeschlossen
ist und die Logik der Sperreinrichtung für sicheres Anlaufen rückgesetzt wurde.
[1] Alarm aktiv TRUE, wenn sich der Antrieb im Alarmzustand befindet. Zur Wiederaufnahme der An-
triebstätigkeit muss der Alarm rückgesetzt werden.
[2] Kein Alarm TRUE, wenn sich der Antrieb nicht im Alarmzustand befindet.
[3] Mot DZ><0 TRUE, wenn die Ausgangsbrücke des Frequenzumrichters freigegeben und funktionstüchtig ist.
[4] Mot DZ=0 TRUE, wenn die Ausgangsbrücke des Frequenzumrichters nicht betriebsbereit ist (die
sechs Schalter sind offen).
[5] Mot DZ<0 TRUE, wenn sich der Motor gegen den Uhrzeigersinn dreht.
[31] Freq>Sw1 TRUE, wenn die (gemessene oder geschätzte) Motordrehzahl über der von den Para-
metern P.440 und P.441 festgelegten Schwelle liegt.
[32] Freq<Sw1 TRUE, wenn die (gemessene oder geschätzte) Motordrehzahl unter der von den Para-
metern P.440 und P.441 festgelegten Schwelle liegt. Diese Funktion wird normalerweise
zum Herausfinden der Nulldrehzahl verwendet (siehe Sequenz auf Abbildung 7.2). Dieses
Signal ist als Voreinstellung an Klemme 17 verfügbar, Digitalausgang 2.
 Loading...
Loading...




