19
11.5.3 Control mode (2.1.2)
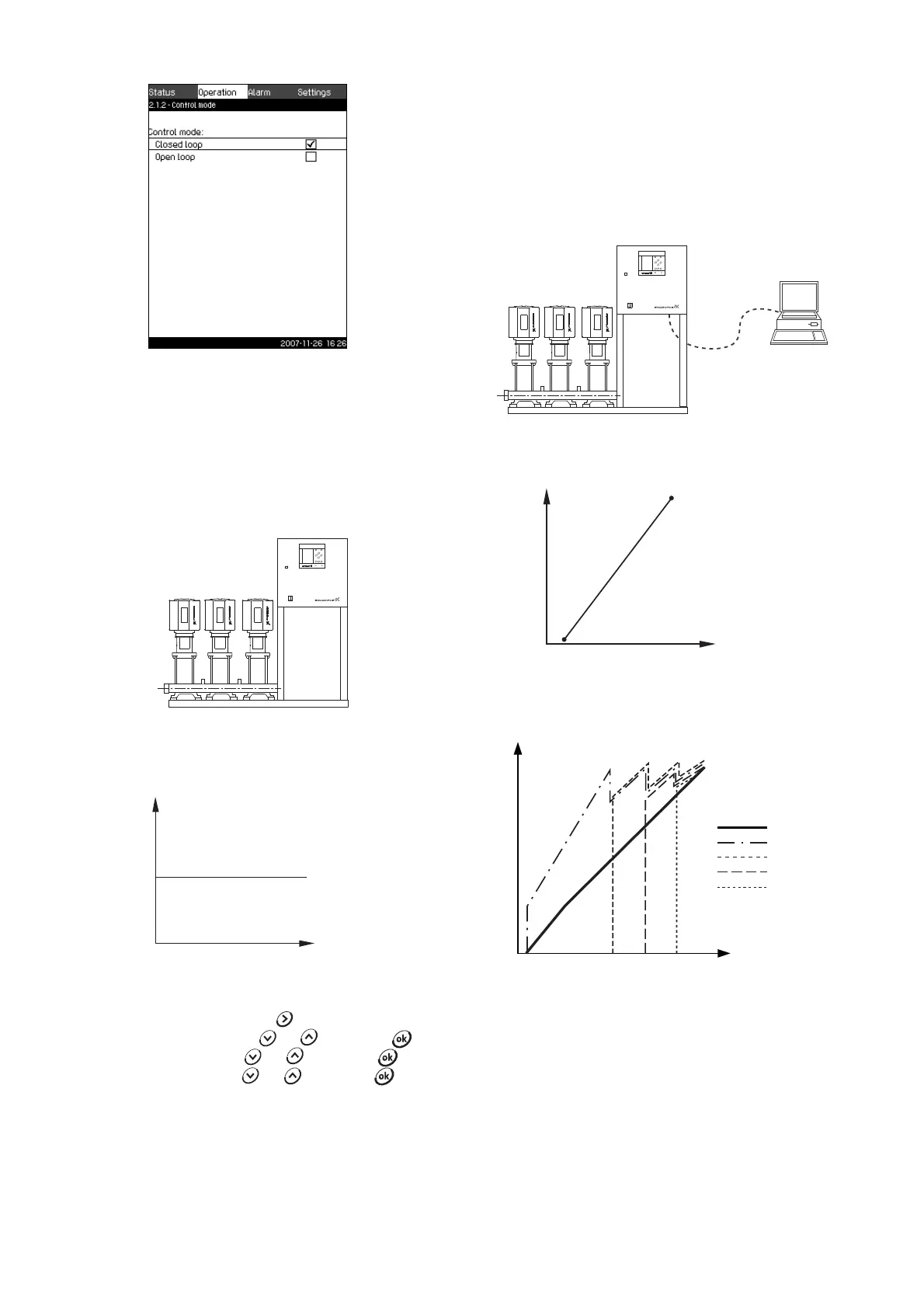
Fig. 17 Control mode
Description
There are two control modes, namely closed and open loop.
Examples:
Closed loop
The typical control mode is closed loop where the built-in
PI controller ensures that the system reaches and maintains the
selected setpoint. The performance is based on the setpoint set
for closed loop. See figs 18 and 19.
Fig. 18 Booster system controlled by built-in PI controller
(closed loop)
Fig. 19 Regulation curve for closed loop
Setting via control panel
1. Mark the Operation menu with .
2. Mark Further settings with or , and press .
3. Mark Control mode with or , and press .
4. Select Closed loop with or , and press .
5. Set the setpoint. See sections 11.5.4 Setpoints (2.1.3) and
11.5.1 Operation (2).
Open loop
In open-loop control, the pumps run at a fixed speed.
The pump speed is calculated from the performance set by the
user (0-100 %). The pump performance in percentage is
proportional with the flow rate.
Open-loop control is usually used when the system is controlled
by an external controller which controls the performance via an
external signal. The external controller could for instance be a
building management system connected to the Control MPC.
In such cases the Control MPC is like an actuator.
See figs 20 and 21.
Fig. 20 Booster system with external controller (open loop)
Fig. 21 Regulation curve for open loop
Fig. 22 Regulation curve for Control MPC-E in open loop
TM03 2283 4807TM03 2231 3905TM03 2390 4105
P [bar]
Time [sec]
Setpoint
TM03 2232 3905
TM03 2391 3607TM03 9977 4807
0
5
Input [%] from
external controller
Flow rate [m
3
/h]
Flow rate [m
3
/h]
Input [%] from
external controller
Pump 1
Pump 4
Pump 3
Flow rate
Pump 2