68
PME-MP60/MP07
A0616-13.4 enHBM
The current errors are continuously displayed for each channel (see also page
29). Press
+
, until you get into ”ERROR” display mode.
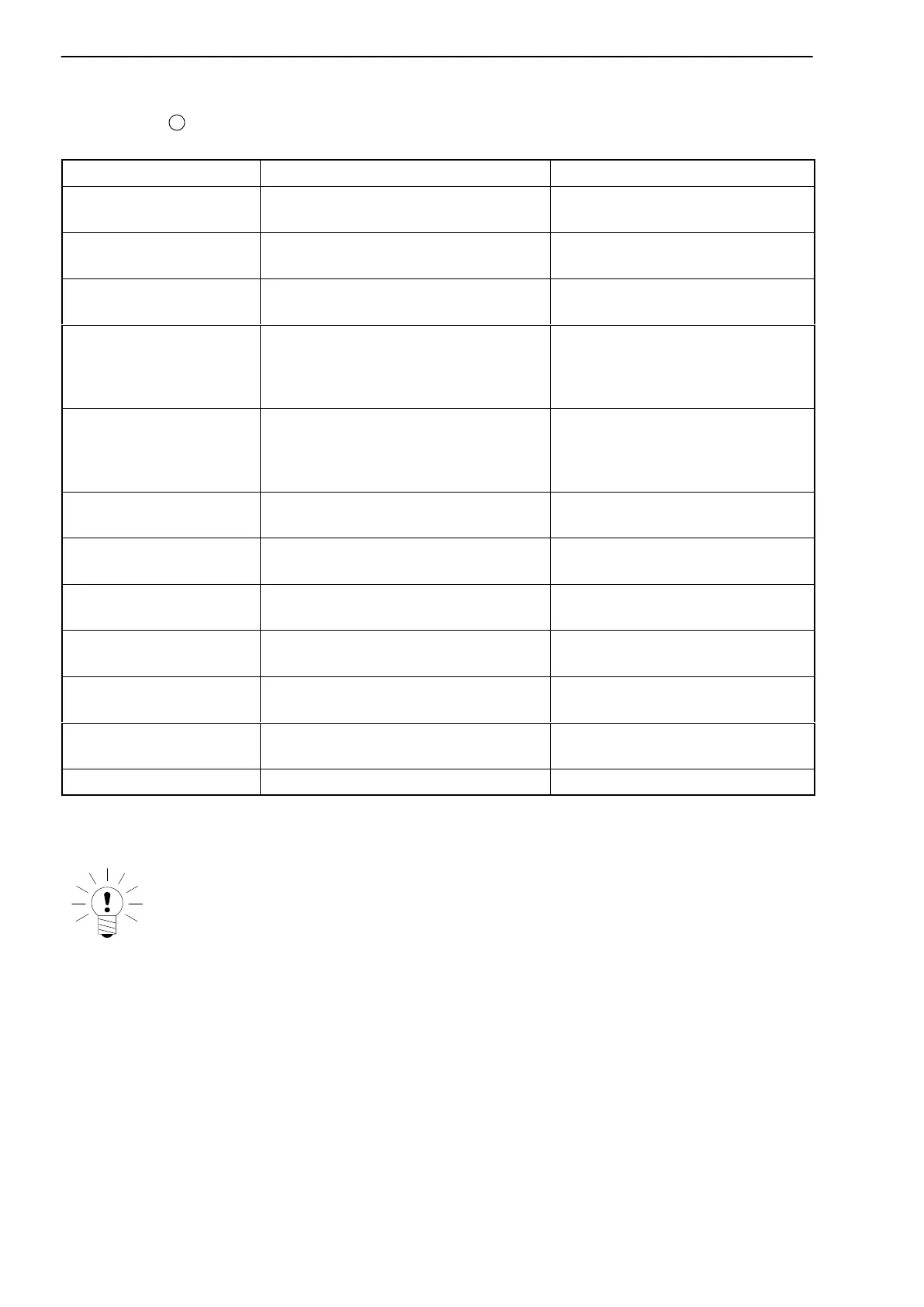
Error message Cause Remedy
Counter
(Cntr Ovfl)
Maximum number of metering
pulses exceeded
Zeroing
Input
(Inp Ovf)
Input frequency too high Adapt measuring range
AnlgOutp
(AnlgOvfl)
analogue output overflow Check assignment of display
value analogue output
PkValMin
(PkMinOvf)
Minimum peak value overflow 1. Delete peak value via external
remote or
2. In PEAKVAL. STORE group
”ClearPkV” Yes
PkValMax
(PkMaxOvf)
Maximum peak value overflow 1. Delete peak value via external
remote or
2. In PEAKVAL. STORE group
”ClearPkV” Yes
Net
(Net+Ovf; Net-Ovf)
Net value overflow
1)
Decrease display by one decimal
place
Gross
(Grs+Ovf; Grs-Ovf)
Gross value overflow
1)
Decrease display by one decimal
place
Transduc Transducer error signal (Low active) See the Operating Manual for
the transducer
Scaling
2)
(Scal.Err)
Input characteristic too steep Change input characteristic
AnlgScal
(AScalErr)
Input or output characteristic too
steep
Change input or output
characteristic
(Init Err) No valid original calibration values Restart, send PME to
manufacturer (HBM)
CAN Tx No PDO request on bus Check CAN bus configuration
1)
"1 000 000 output at CAN-bus
2)
see page 40
NOTE
The MP60(DP) can indicate the transducer errors generated by the tor-
que sensor. But to do this, the error signal from the torque sensor must
be connected across Pin 7 of the transducer plugs (15−pin sub−D plugs)
on the MP60(DP).
The ”transducer error” function in the MP60(DP) must also be activated.