Chapter 3. Wiring and Signals
3-23
■ Caution when using the absolute value encoder
Set [Encoder type (P1-1)] to 6 when the absolute value encoder is used.
When [Encoder type (P1-1)] is set to 6, the input contact (SPD3/type) is automatically reset to the
absolute position request (ABSREQ).
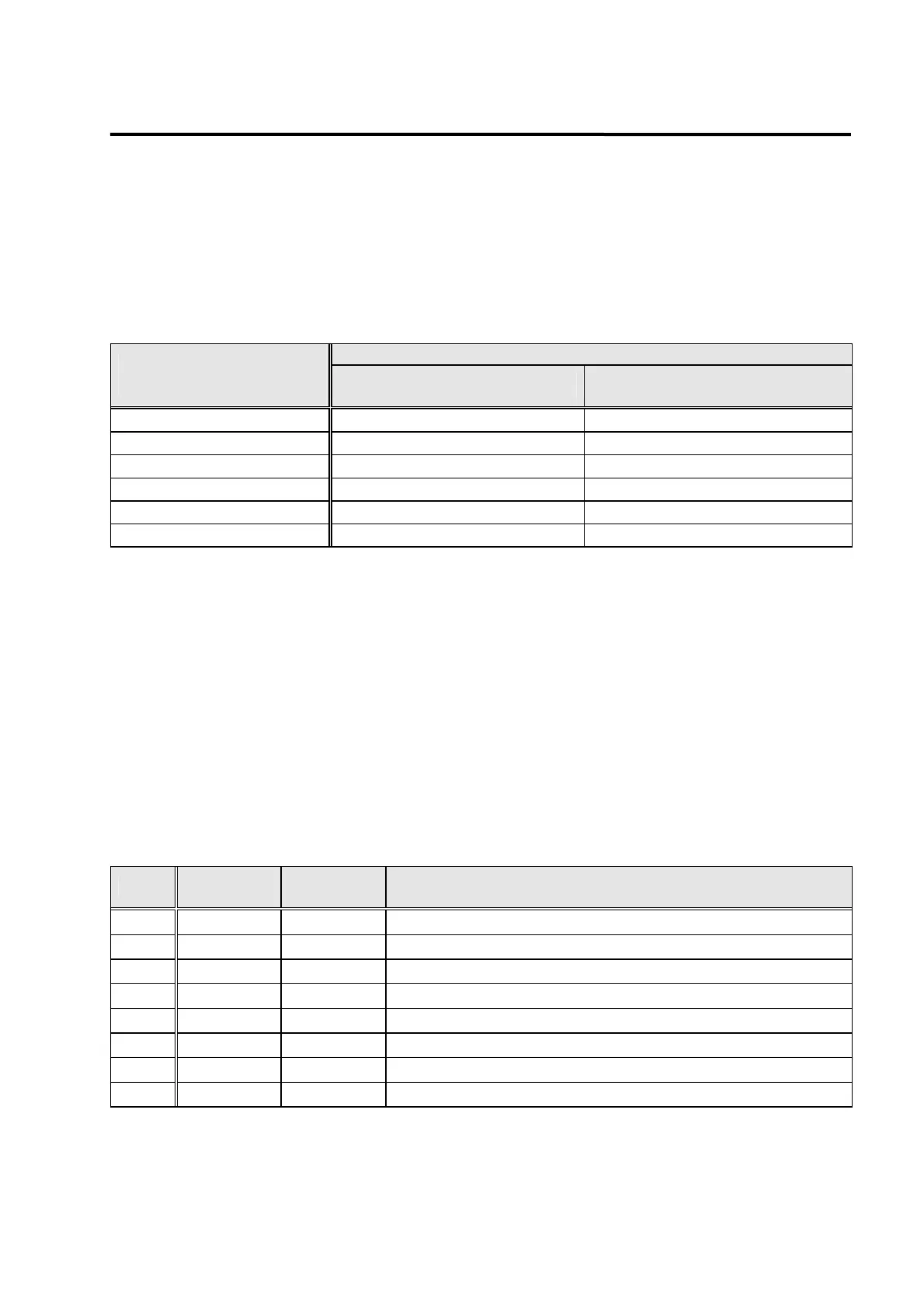
[Selection of servo model]
Servo model
Set value of
[Controller type (P2-01)]
When incremental encoder
is used
When absolute value encoder
is used
0 Torque servo Torque servo
1 Speed servo Speed servo
2 Position servo Position servo
3 Speed/position servo Position servo
4 Speed/torque servo Torque servo
5 Position /torque servo Torque Servo
[Selection of speed command] (when used as speed servo)
If the absolute value encoder is used to configure servo, the input contact (SPD3) is reset to
(ABSREQ). Hence, (SPD3) cannot be used to select speed command.
The speed command can be input freely in 3 methods:
① Based on 3 digital speed commands ([Speed CMD1 (P3-1)]-([Speed CMD3 (P3-3)]),
② Based on external analog speed command, and
③ Based on override operation by combining ① and ②.
The internal speed command selection based on these 3 methods is determined as follows
according to the rpm selection contacts [(SPD1), (SPD2)] of CN1 and the set values of [Override
ON/OFF (P3-18)].
[P3-18]
Speed
selection 2
Speed
selection 1
Speed command
0 OFF OFF Analog command speed
0 OFF ON [Speed CMD1 (P3-01)] set speed
0 ON OFF [Speed CMD1 (P3-02)] set speed
0 ON ON [Speed CMD1 (P3-03)] set speed
1 OFF OFF Analog command speed
1 OFF ON [Speed CMD1 (P3-01)] set speed + analog command speed
1 ON OFF [Speed CMD1 (P3-02)] set speed + analog command speed
1 ON ON [Speed CMD1 (P3-03)] set speed + analog command speed
Where ON: Applicable contact connected to "GND 24"
OFF: Applicable contact connected to "+24V", or applicable contact not connected.