5. Modify the running frequency via SCI communication function code 0X06 writing register
0x3201. Such as: modify the local address two of slave with running frequency of 45.00Hz, as
following table.
Address Code Register address Register content Checksum
Command
frame
0x02 0x06 0x32 0x01 0x11 0x94 0xDB 0x7E
Answer
frame
0x02 0x06 0x32 0x01 0x11 0x94 0xDB 0x7E
Control the start/stop and set the running frequency via using communication
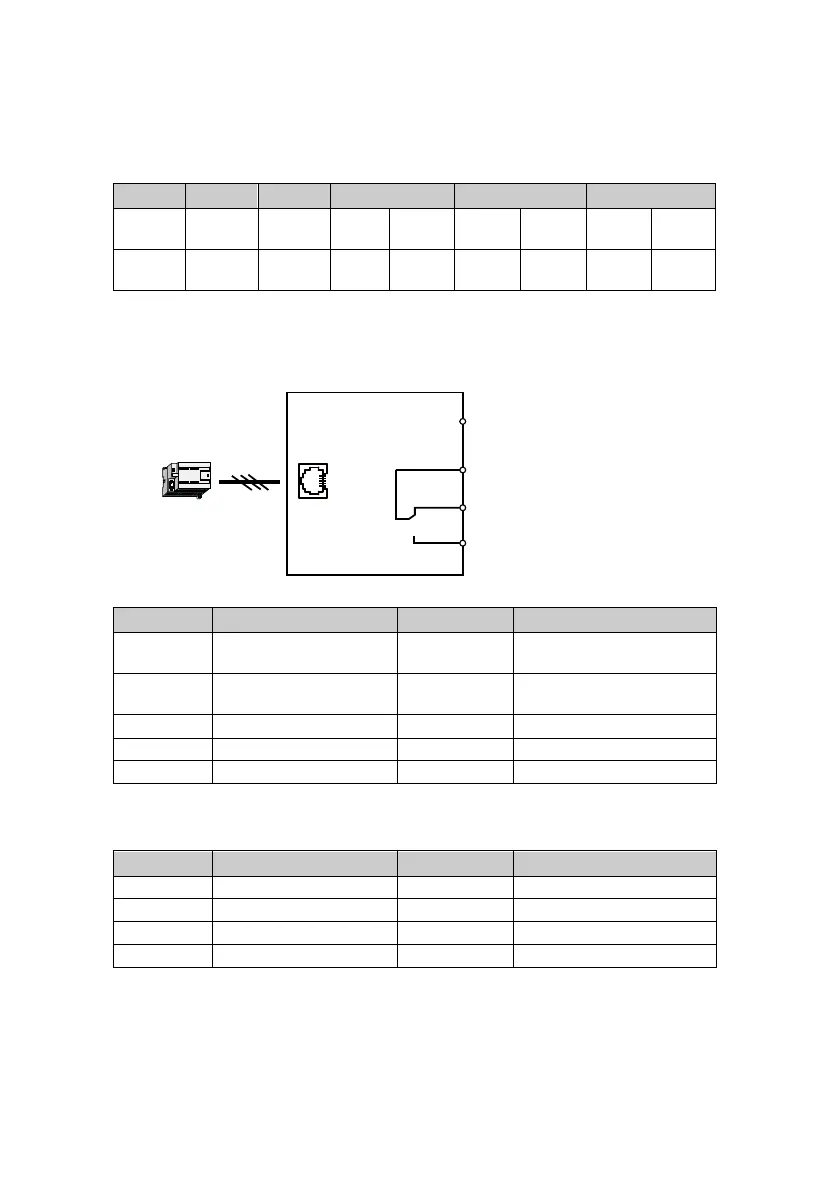
1. The communication wirings are as following figure.
2. After power on, set the functional parameters in accordance with wirings, as following table.
No. Parameter name Setting value Meaning
F00.10
Frequency setting source
selection
2 SCI communication setting
F00.11
Command setting source
selection
2
SCI communication running
command source
F17.00 Data format 0 (factory setting) 1-8-2 format, no parity, RTU
F17.01 Baud rate 3 (factory setting) 9600bps
F17.02 Local address 2 (factory setting)
3. Set the motor parameters (see motor nameplate parameters) and acceleration/deceleration
time via the display panel, as following table.
No. Parameter name No. Parameter name
F08.00 Rated power of motor 1 F08.04 Rated RPM of motor 1
F08.01 Rated voltage of motor 1
F08.02 Rated current of motor 1 F03.01 Acceleration time 1
F08.03 Rated frequency of motor 1 F03.02 Deceleration time 1
DO1
R1A
R1C
R1B
Fault indication normally closed contact
Output indicating signal at running
Fault indication normally open contact
Common terminal
1
2
3 4 5 6 7 8
RJ4 5
MODBUS
communication
SCI communication
terminal
 Loading...
Loading...


