21
INOVANCE TECHNOLOGY EUROPE GmbH
MD800 EtherCAT Starting Guide_EN_v1.1_20211109.docx
6.4 CIA402 PROTOCOL
The SI-ECAT only supports the CiA402 PV and CSV profiles. Although these two profiles are open loop since the
MD800 does not support speed feedback.
6.4.1 VELOCITY MODE
In this mode of operation, the host controller gives the target speed, acceleration, and deceleration to the
MD800 drive. Speed control and torque control are performed by the drive.
The below table shows the PV profile related objects:
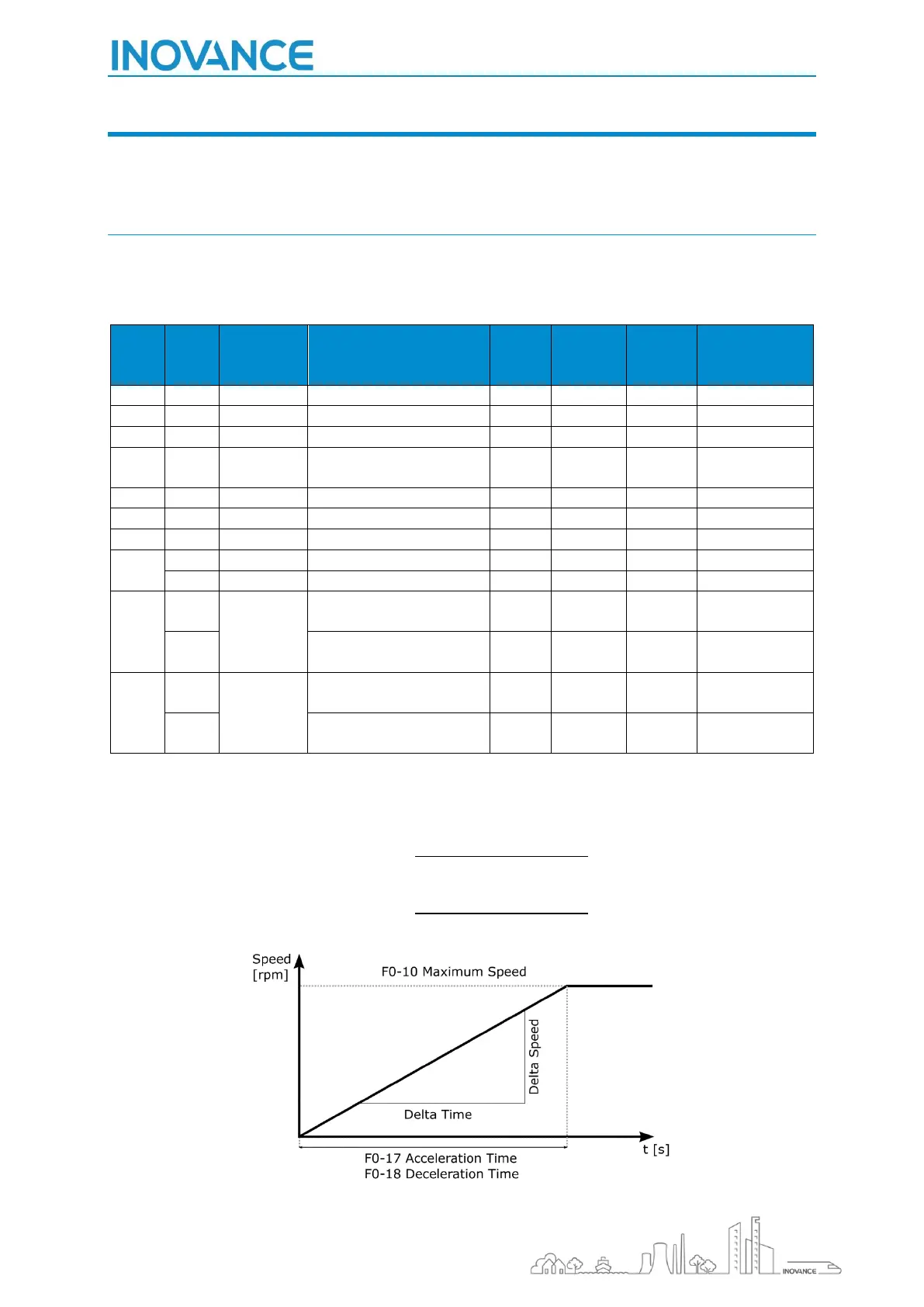
With this mode, the acceleration and deceleration ramps are defined to perform the speed profile.
𝐹0 − 17 𝐴𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 𝑇𝑖𝑚𝑒 =
𝐹0 − 10 𝑀𝑎𝑥𝑖𝑚𝑢𝑚 𝑆𝑝𝑒𝑒𝑑
𝐴𝑐𝑐. 𝐷𝑒𝑙𝑡𝑎 𝑆𝑝𝑒𝑒𝑑
× 𝐴𝑐𝑐. 𝐷𝑒𝑙𝑡𝑎 𝑇𝑖𝑚𝑒
𝐹0 − 18 𝐷𝑒𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 𝑇𝑖𝑚𝑒 =
𝐹0 − 10 𝑀𝑎𝑥𝑖𝑚𝑢𝑚 𝑆𝑝𝑒𝑒𝑑
𝐷𝑒𝑐. 𝐷𝑒𝑙𝑡𝑎 𝑆𝑝𝑒𝑒𝑑
× 𝐷𝑒𝑐. 𝐷𝑒𝑙𝑡𝑎 𝑇𝑖𝑚𝑒

 Loading...
Loading...





