- 76 -
4 Operation Panel
4
Function
Code
Name Unit Meaning Display Examples
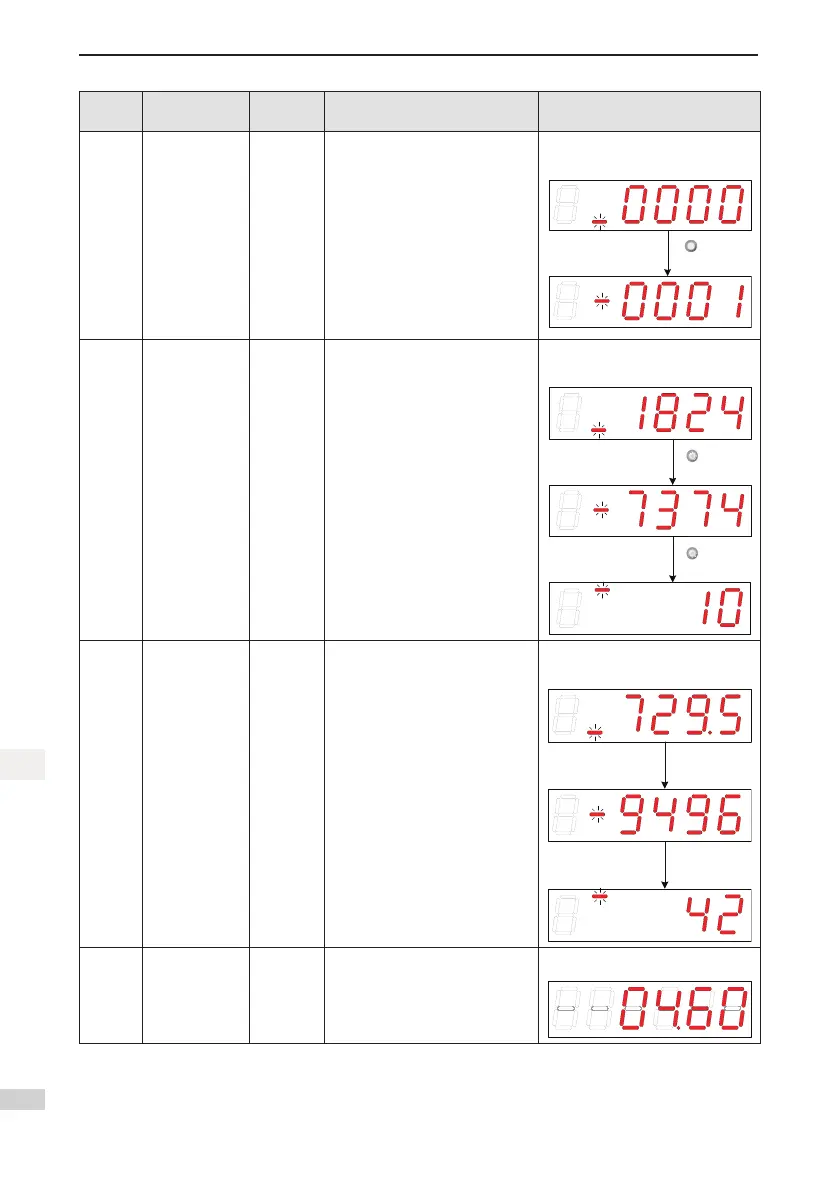
H0B-15
Encoder position
deviation
counter
(32-bit decimal
display)
Encoder
unit
Deviation of the encoder position =
Total input position references
(encoder unit) -
Totalencoderfeedbackpulses
(encoder unit)
10,000 encoder units is displayed as
follows:
H0B-17
Feedbackpulse
counter (32-bit
decimal display)
Encoder
unit
The system counts and displays
thepositionfeedbackfromthe
servo motor encoder (encoder
unit).
Note:
When an absolute encoder motor
is used, H0B-17 displays only the
low 32-bit data of motor position
feedback.Theactualmotor
positionfeedbackcanbeobtained
in H0B-77 (absolute position low
32 bits of absolute encoder) and
H0B-79 (absolute position high 32
bits of absolute encoder).
1,073,741,824 encoder units is
displayedasfollows:
H0B-19
Total power-
on time (32-bit
decimal display)
0.1s
The system counts and displays
the total servo drive power-on time.
429,496,729.5s is displayed as
follows:
Long press
SHIFT
Long press
SHIFT
H0B-24
Phase current
effective value
0.01 A
It indicates the phase current
effective value of the servo motor.
4.60Aisdisplayedasfollows:

 Loading...
Loading...





