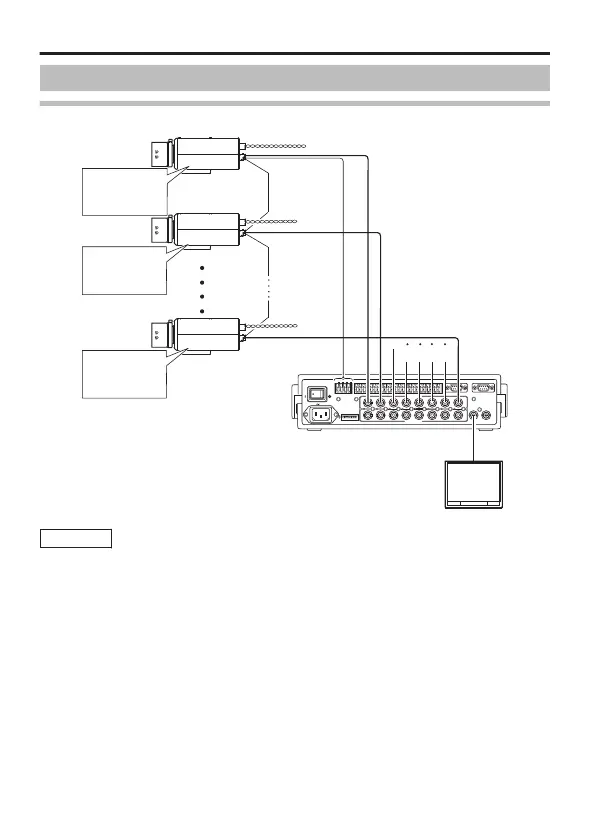
Connexion du système
Diagramme de connexion
.
1
TO CAMERA DATA I / O
RX
+
RX
-
TX
+
TX
-
COM
1 2 3 4 5 6 7 8
COM
9/1 10/2 11/3 12/4 13/5 14/6 15/7 16/8
COM COM COM
CAMERA
SW
UNIT
ALARM
AUTO
431 2 875 6
2 3 4 5 6 7
8
1
MONITOR
OUTPUT
MONITOR
SERIAL-2SERIAL-1
VIDEO INPUT
VIDEO OUTPUT
OUTPUT
2
1
ON
2 3 4 5 6 7
8
ALC
LEVEL
Av Pk
L H
ALC
LEVEL
Av Pk
L H
ALC
LEVEL
Av Pk
L H
MACHINE ID : 8
(Écran menu)
RX TERM : ON
(Commutateur)
MACHINE ID : 2
(Écran menu)
RX TERM : OFF
(Commutateur)
MACHINE ID : 1
(Écran menu)
RX TERM : OFF
(Commutateur)
RM-P2580
Câble de signal vidéo
Moniteur
CAMÉRA 8
CAMÉRA 2
CAMÉRA 1
Câble de signal
de contrôle
Câble d’alimentation
Memo
v
Pendant le contrôle à l’aide du terminal RM-P2580, sélectionnez
“JCCP” pour l’élément [COMMUNICATION] sur l’écran
[MAINTENANCE]. Sur l’écran [COMMUNICATION (JCCP)],
réglez [PROTOCOL 1] sur “MULTIDROP”, et [PROTOCOL 2]
sur “DUPLEX”.
v
Pour le contrôle à partir d’un dispositif autre que le terminal RM-
P2580, réalisez les réglages à l’aide des boutons et de l’écran
de menu, selon le système utilisé.
v
Pour les systèmes utilisant le terminal RM-P2580, plusieurs caméras
(jusqu’à 16 unités) sont connectées via un ensemble de câbles de
signaux de contrôle. Ainsi, si le réglage du commutateur de l’une
des caméras connectées est incorrect, l’ensemble du système ne
fonctionnera pas correctement. "Branchement des câbles de
signaux de contrôle sur la caméra (arrière)" (A p. 17)
Connexion/Installation
F-16