User Manual CANopen/EtherCAT
20
4.2.1 Setting the software address and Baud rate
The software address and Baud rate can be set using the following device parameters via
DriveManager:
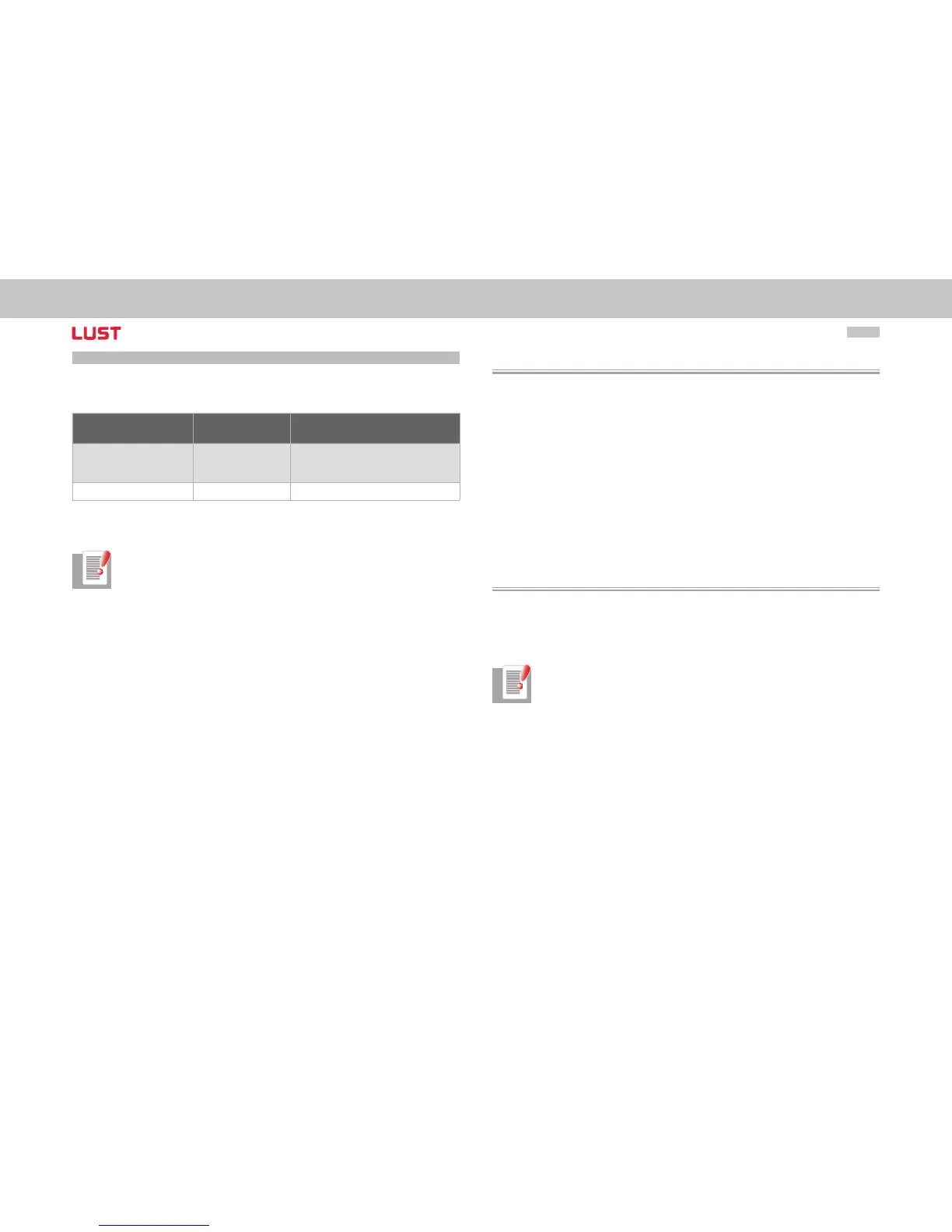
Parameter Function Description
2005-COM_CAN_Adr CANopen address
Address assignment via parameter
For more information on setting the
address, see section 2.1
2006-COM_CAN_Baudrate Baud rate Permissible Baud rates - see section 2.3
Table Parameters on the Bus Systems function screen
Note: ServoOne has a default Baud rate of 1 mbit.
4.3 Commissioning instructions
For a variety of reasons, it may be that a drive device does not respond to a telegram:
There is no reply if the telegram frame (Baud rate, data length) on the master
computer is not correct.
There is no reply if a drive device is addressed with the wrong bus address.
There is no reply if the serial connection between the master computer and the
drive device is not correctly set up.
There is no reply if the 24 V supply to the CAN connection is missing or the
cabling is faulty.
There is no valid reply if several devices with the same device address are con-
nected to the bus.
There is no reply if the device has certain network states.
4.4 Testing the higher-order controller
To activate changed settings the device must be switched off and back on again. When
the power is connected, after an initialisation period of a few seconds the device must
transmit a one-off boot-up message (ID 700h + node ID = 701h for device address 1).
If this happens, the communication is OK.
Note: During transfer of data to the device via SDO telegrams the number
of data bytes transferred should be taken into account. For this the correct
length information must be transferred in the control byte.
Alternatively, however, an SDO transfer without specification of the data
length is also possible. The correct operation of the control byte in the
SDO telegram should also be observed.
•
•
•
•
•
•