User Manual CANopen/EtherCAT
51
[Chapter 9]
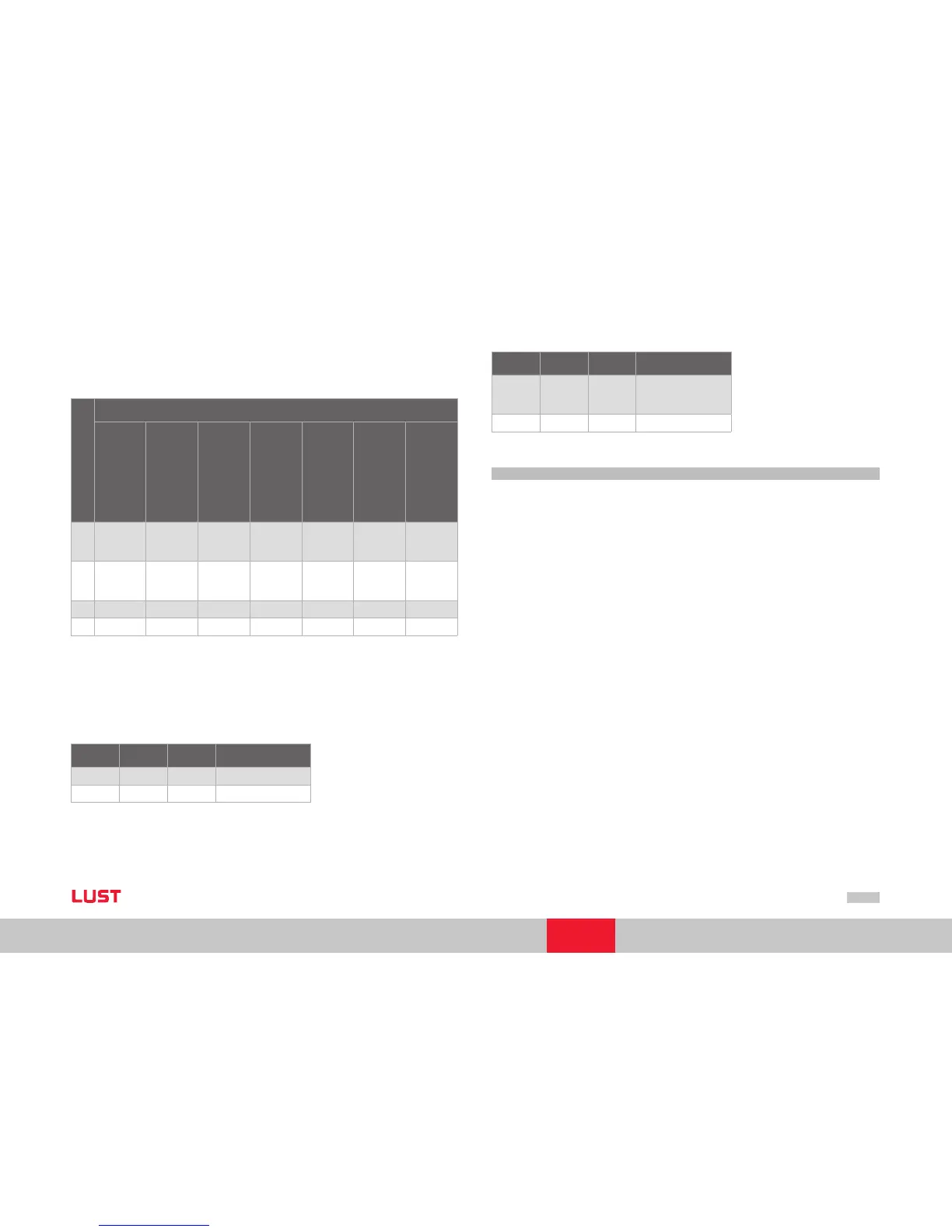
Bits 4 - 6 and 8
The bits 4 - 6 and 8 are interpreted differently depending on the active operation mode
(object “modes of operation display“).
Bit
Operation mode
Profile-
position
mode
Profile
velocity-
mode
Homing-
mode
Inter-
polated
position
mode
Cyclic
synchro-
nous
position
mode
(Ether-
CAT)
Cyclic
synchro-
nous
velocity
mode
(Ether-
CAT)
Cyclic
synchro-
nous
torque
mode
(Ether-
CAT)
4
New
setpoint
reserved
Homing
operation
start
Enable IP
mode
reserved reserved reserved
5
Change set
immedia-
tely
reserved reserved reserved reserved reserved reserved
6 abs/rel reserved reserved reserved reserved reserved reserved
8 Stop Stop Stop Stop reserved reserved reserved
Table Mode-specific bits in the control word
Use of the specific bits is explained in more detail in the sections on the operation
modes.
Bits 7 and 11- 15
Bit Name Value Description
7 Fault reset 0 ð 1 Fault reset
11 No function
Bit Name Value Description
.
.
.
No function
15 No function
9.1.3 Status word DS402
Object 6041h-status word
The content of the object is also mapped in parameter 2209 - MP_Statusword. The sta-
tus word indicates the current status of the drive. It contains the following bits for:
current state of the device,
operating state of the mode and
manufacturer-specific options.
–
–
–