User Manual CANopen/EtherCAT
37
[Chapter 7]
7 Setting the Device Parameters
for EtherCAT
7.1 Supported EtherCAT functionality
Below you will find an overview of the EtherCAT functionality implemented in ServoOne.
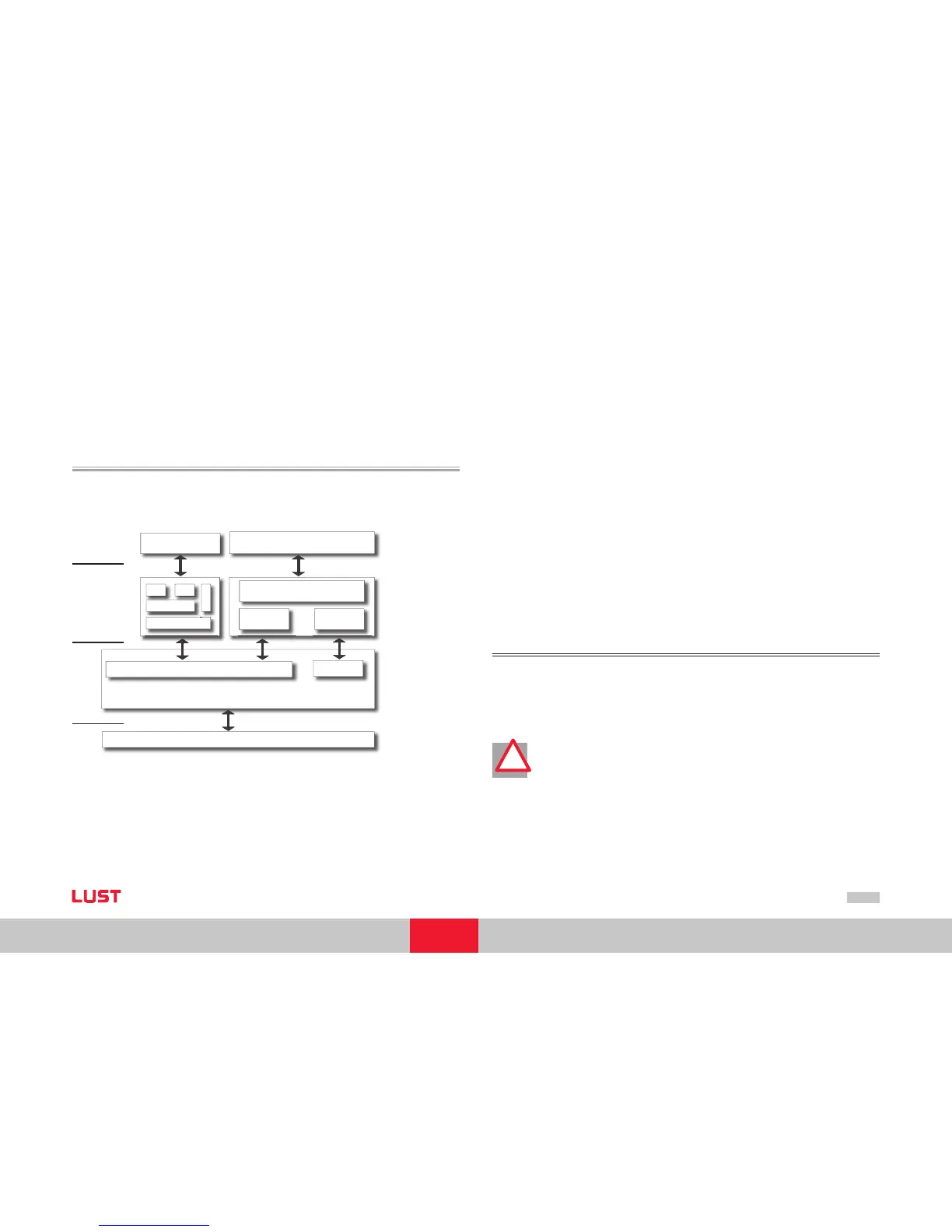
The next diagram shows the basis for the following description. It shows the structure of
EtherCAT based on the OSI 7 layer model.
Figure Structure EtherCAT
The physical layer of EtherCAT based on IEEE802.3/100 BaseTX Ethernet physics. Based
on this the EtherCAT Data Link Layer (DL) follows, which is split into mailbox and process
data. The following layer is termed as AL (Application Layer) and includes the services of
CoE (CAN over EtherCAT) and EoE (Ethernet over EtherCAT).
All services that are not time-critical, i. e. their execution/contents do not critically inter-
vene in process data in terms of time, are grouped together in the mailbox. The mailbox
is used as a service data channel and thus also enables access to drive parameters. This is
done via the SDO (Service Data Objects) channel. The mailbox service also provides the
basis for the services of EoE (Ethernet over EtherCAT) and the error handling (emergency
telegrams).
The process data is designed on the basis of CANopen (CiA DS301). This means there is
mapping of objects in PDOs (Process Data Objects) that are cyclically transferred. This
process data includes, for example, cyclic position, speed or torque reference values and
actual values.
The basis for both SDO and PDO accesses to the drive is always the object directory,
which is realised based on CANopen. For the user this means that these objects can be
accessed both via CANopen and via EtherCAT.
In the case of ServoOne the DS402 profile is again set up on the application layer.
For information on this layer refer to the sections “Implemented DS402 functionality“
and “DS402 operation modes“.
An overview of the EtherCAT functionality of ServoOne is provided below:
Process Data
4 RxPDOs
4 TxPDOs
Transfer length = max. 8 bytes per PDO
Variable mapping as per DS301 (cf. CANopen)
Attention: The PDO must have an even number of bytes assigned. If an
uneven number is required, this must be filled up with a “Dummy Byte“ for
example...
Cycle times
Transfer cyclic position references with max. 8 kHz (125µs)
Transfer cyclic speed reference with max. 8 kHz (125µs)
Transfer cyclic torque references with max. 8 kHz (125µs)
•
•
•
•
•