User Manual CANopen/EtherCAT
53
[Chapter 9]
Bits 12 and 13:
These bits are dependent on OPERATION MODE - see section 6.
The following table provides an overview:
Bit
Operation mode
Profile-
position
mode
Profile
velocity-
mode
Homing-
mode
Inter-
polated
position
mode
Cyclic
synchro-
nous
position
mode
(Ether-
CAT)
Cyclic
synchro-
nous
velocity
mode
(Ether-
CAT)
Cyclic
synchro-
nous
torque
mode
(Ether-
CAT)
12
Setpoint
acknow-
ledge
Speed
Homing
attained
IP mode
active
Target
position
ignored
Target
velocity
ignored
Target
torque
ignored
13
Following
error
Max slippa-
ge error
Homing
error
reserved
Following
error
reserved reserved
Table Mode-specific bits in the control word
Bits 14 and 15:
These bits are implemented specific to manufacturer; explanatory notes to them are
given in the sections on the various operation modes.
9.2 Profile Velocity Mode
This operation mode (mode of operation = 3) is used to activate the device at a velocity
setpoint as per the DS402 profile. The drive is in speed control in this mode of operation.
The units, the reference and ramp variable are produced from the settings of the factor
group. Also refer to the section 5.4 “Units and scalings“ in this regard.
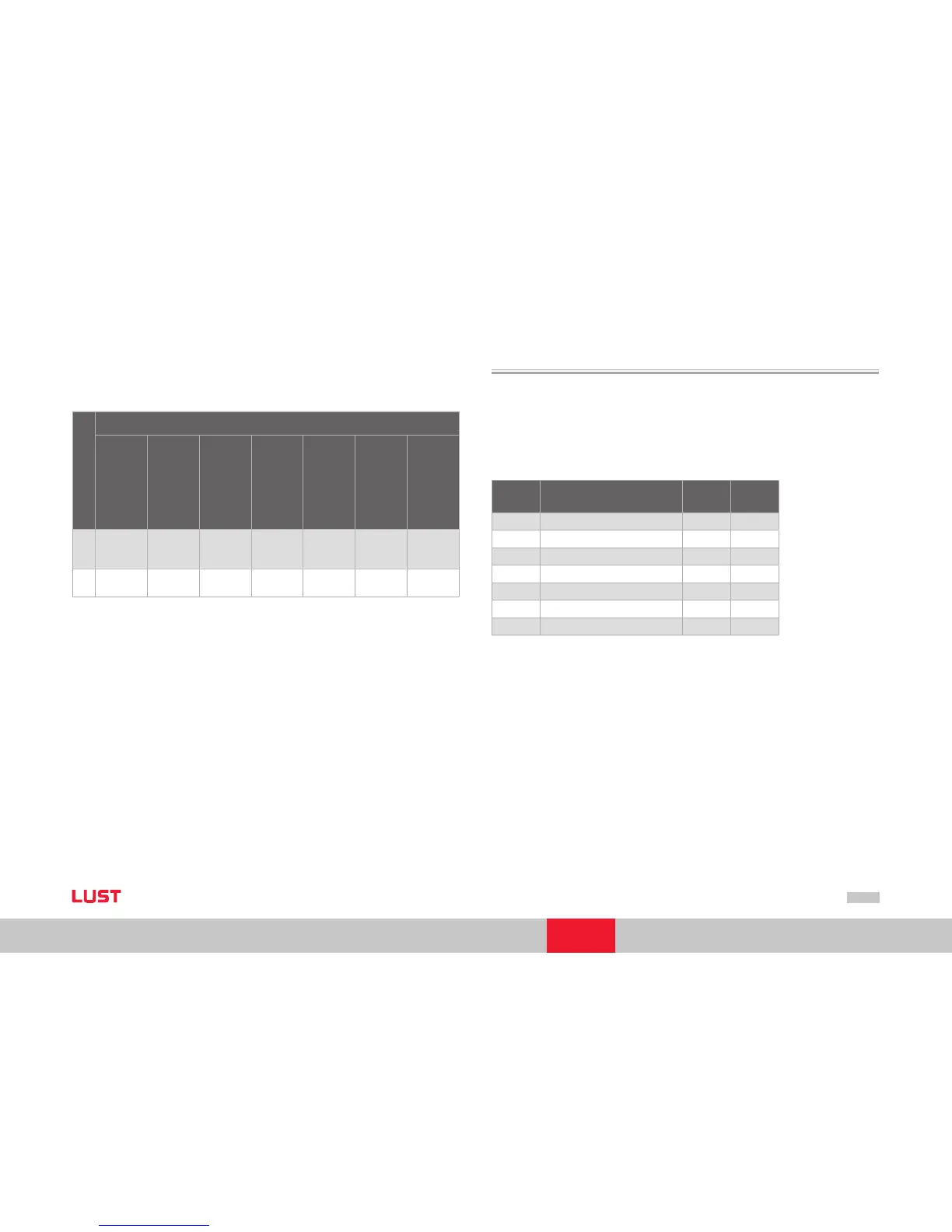
The device supports the following objects for this mode:
Object
No.
Object
Name
Object
Code
Type
0x606C Velocity actual value VAR Int32
0x60FF Target velocity VAR Int32
0x6094
Velocity encoder factor ARRAY Int32
0x6083
Profile acceleration VAR Int32
0x6084
Profile deceleration VAR Int32
0x6085 Quick Stop deceleration VAR UInt32
0x607E Polarity VAR UInt8
Table Profile Velocity Mode