User Manual CANopen/EtherCAT
55
[Chapter 9]
9.3 Homing mode
This mode (Mode of operation = 6) is used to perform a homing of a position-control-
led axle. The drive executes a movement according to the programmed reference run
type (homing method).
The various homing methods differ in the integration of hardware limit switch, reference
cam and zero pulse into the encoder system. It should be noted in this that, for limit
switch and reference cam functionality, appropriate digital inputs should be configured:
Limit switch function
LCW - right side HW limit switch
LCCW - left side HW switch
HOMSW - reference cam
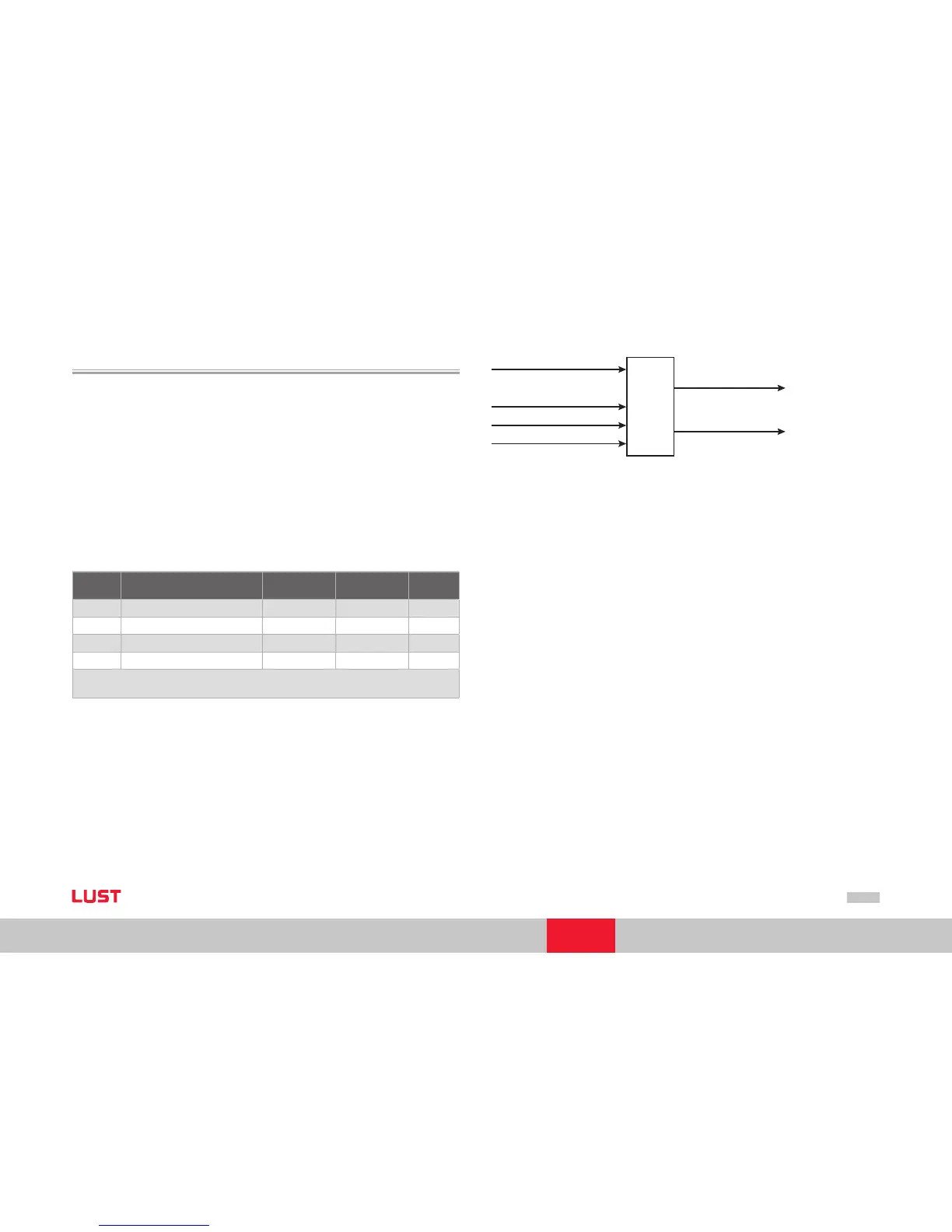
The following objects are supported by the device for this operation mode:
Object
No.
Object
Name
Object
Code
Type Attr.
0x607C Home_Offset VAR Integer32 rw
0x6098 Homing_Method VAR Integer8 rw
0x6099 Homing_Speeds * ARRAY Unsigned32 rw
0x609A Homing_Acceleration VAR Unsigned32 rw
* 0x6099.01 - Quick jog speed
0x6099.02 - Slow jog speed
Table Homing mode
Figure Homing function
ServoOne supports all 35 homing methods defined in DS402.
The individual homing methods are described in the device application manuals with
regard to their function and movement sequencing.
Home Offset:
The HOME OFFSET object is the difference between position 0 of the application and the
HOME POSITION found during homing. It is represented in position units. At the end of
a homing run the HOME OFFSET is added to the HOME POSITION found. All subsequent
absolute positioning operations relate to this new home position.
A change in the referencing run type and the associated properties is possible in two
ways. The reference run can be changed either via DriveManager or CAN.
For configuration via CANopen the objects of the homing mode can be directly
addressed. For example, for a change to the reference run type, object 0x6098 can be
changed.