User Manual CANopen/EtherCAT
54
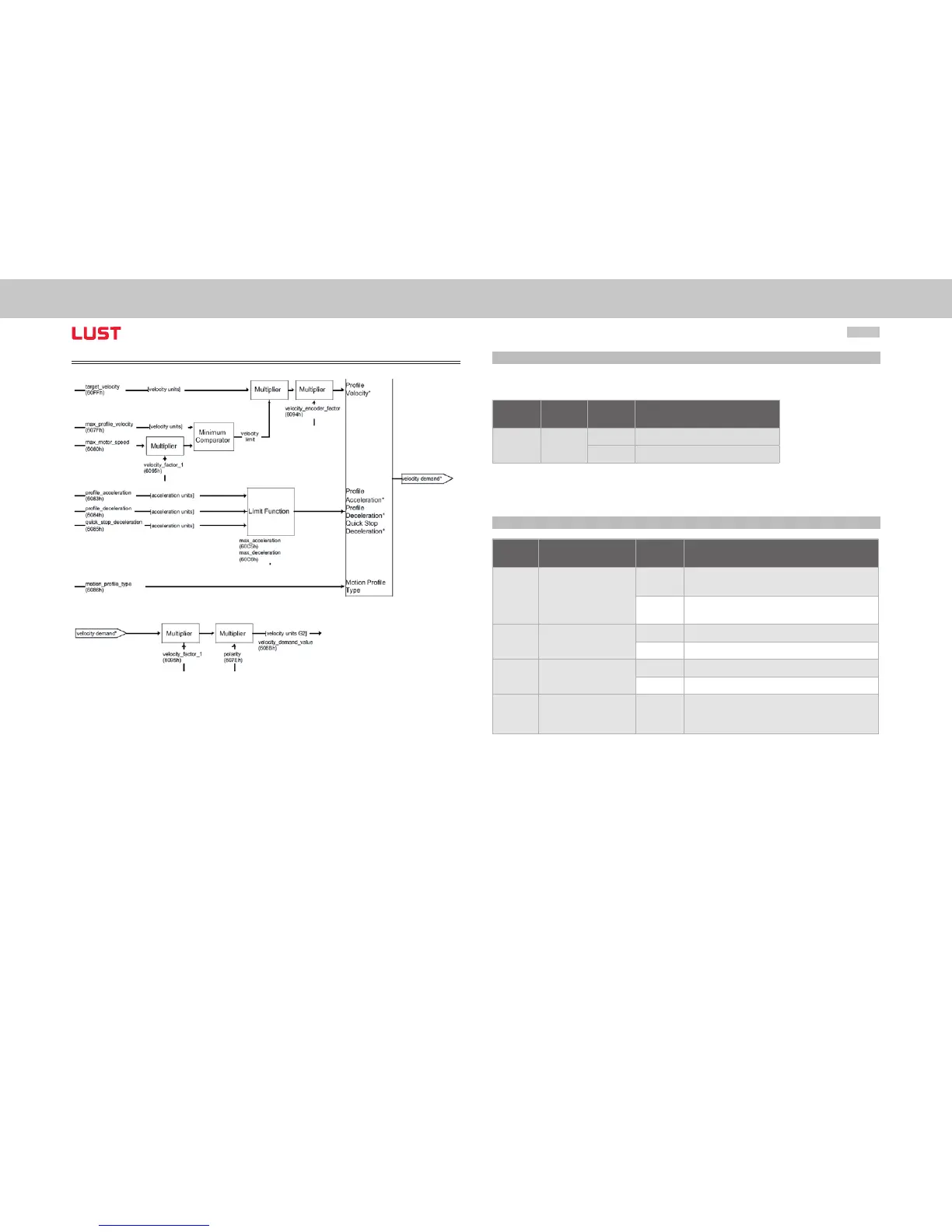
Structure of operation mode
Figure Structure Profile Velocity Mode
9.2.1 Mode-dependent bits in the control word
The structure presented below is based on this operation mode:
Object
No.
Object
Name
Object
Code
Type
8 Stop
0 Execute the motion
1 Stop axle
Table Profile velocity mode bits of the status word
9.2.2 Mode-dependent bits in the status word
Object
No.
Object
Name
Object
Code
Type
10 Target reached
0
Stop = 0: Target velocity not (yet) reached
Stop = 1: Axle decelerates
1
Stop = 0: Target velocity reached
Stop = 1: Axle has velocity 0
12 Speed
0 Speed is not equal to 0
1 Speed is equal to 0
13
Max. Slippage error
0 Maximum slippage not reached
1 Maximum slippage reached
14
Rot 0 1
Axle at standstill
Speed is much lower than parameter
745 MON_REFWINDOW
Table Profile velocity mode bits of the status word