User Manual CANopen/EtherCAT
56
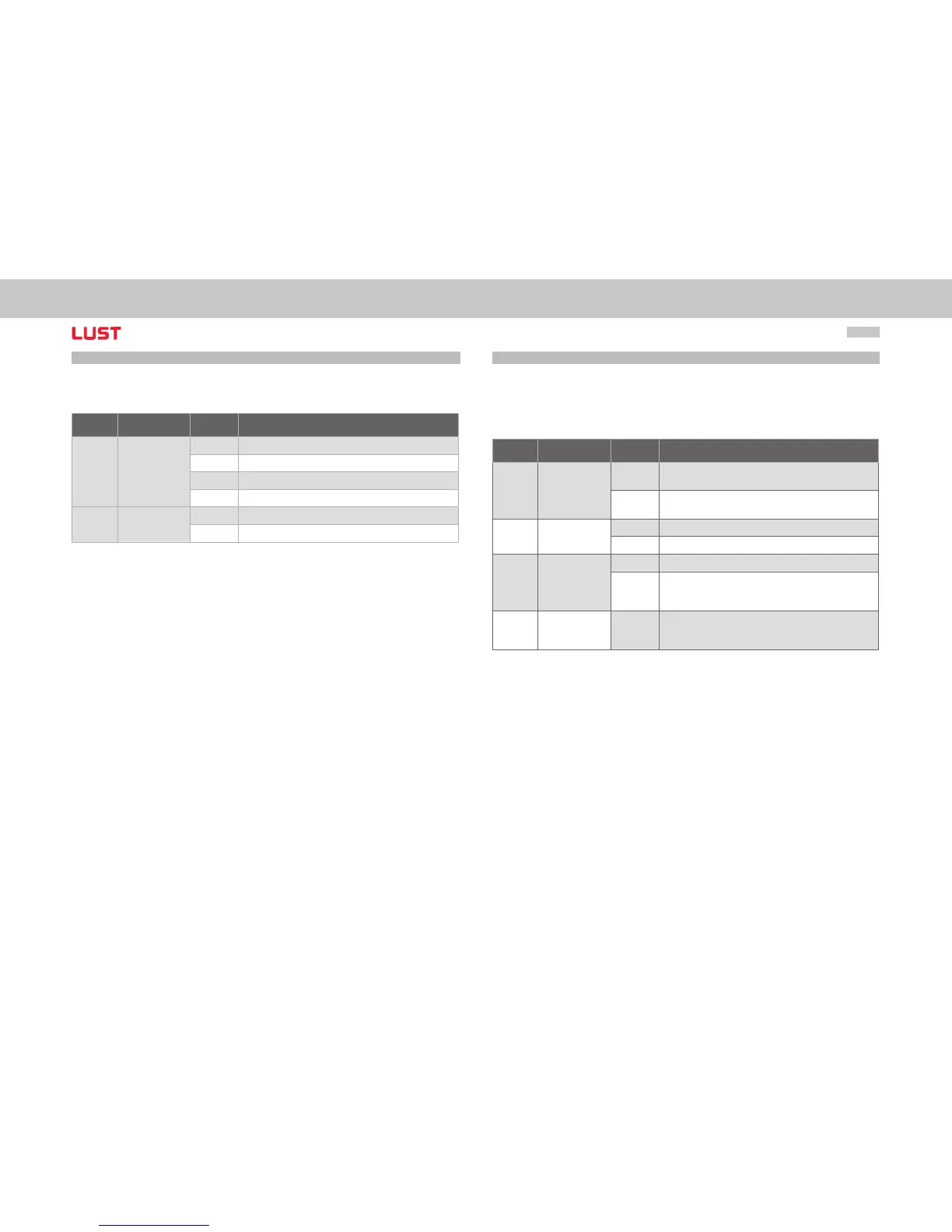
9.3.1 Mode-specific bits in the control word
Bit 4 - HOMING OPERATION START
Bit 8 - STOP
Bit Name Value Description
4
Homing
operation start
0 Homing mode inactive
0 ð 1 Start homing mode
0 Homing mode active
1 ð 0 Interrupt homing mode
8 Stop
0 Execute the instructions of bit 4
1 Stop axle with profile deceleration
Table Homing Mode Bits of the control word
9.3.2 Mode-specific bits in the status word
Bit 10 - TARGET REACHED
Bit 12 - HOMING ATTAINED
Bit 13 - HOMING ERROR
Bit 14 - ROT_0
Bit Name Value Description
10 Target reached
0
Stop = 0: Home position not reached
Stop = 1: Axle decelerates
1
Stop = 0: Home position reached
Stop = 1: Axle has velocity 0
12
Homing
attained
0 Homing mode not yet completed
1 Homing mode carried out successfully
13
Homing
error
0 No homing error
1
Homing error occurred;
Homing mode not carried out successfully
The error cause is found by reading the error code
14
ROT_0 1
Axle at standstill
Speed is much lower than parameter
745 MON_REFWINDOW
Table Homing Mode bits of the status word