User Manual CANopen/EtherCAT
41
[Chapter 8]
8 Implemented
DS402 Functionality
The functions in this section relate to activation in the modes of operation of DS402
profile
1 - Profile Position Mode
3 -
Profile Velocity Mode
6 - Homing Mode
7 - Interpolated Position Mode
8 - Cyclic Synchronous Position Mode (only EtherCAT)
9 - Cyclic Synchronous Velocity Mode (only EtherCAT)
10 - Cyclic Synchronous Torque Mode (only EtherCAT)
8.1 Device control and state machine
The drive is controlled by way of the DRIVECOM state machine defined in DS402
(see DS402 10.1.1 state machine). No remote signal is planned.
8.1.1 General information
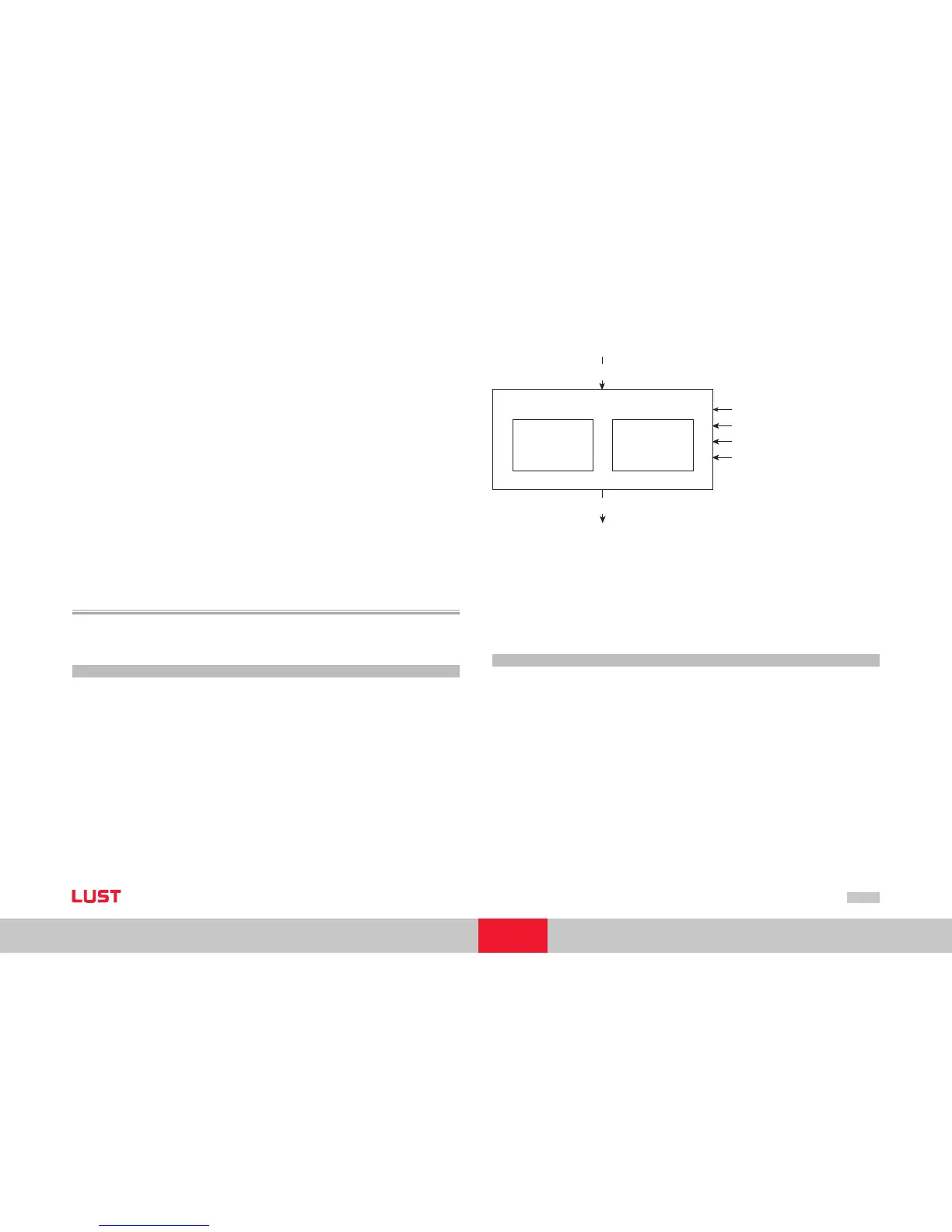
The DEVICE CONTROL FUNCTION monitors all the functions of the controller. This func-
tion is subdivided into
device control of the state machine
operation mode function
–
–
Figure Device controlling
The status of the controller is controlled by way of the control word. The status of the
controller is displayed in the STATUS WORD. In REMOTE MODE the controller is control-
led directly from the CANopen network by PDO and SDO.
The state machine is controlled by the control word. The state machine is also influenced
by internal events, such as errors.
8.1.2 State machine
The state machine describes the CONTROLLER STATUS and the possible options for cont-
rol by the master. A single status indicates a specific internal or external response. At the
same time, the status of a controller restricts the possible control commands. For exa
-
mple, initiating a point-to-point positioning operation is only possible in the OPERATION
ENABLE state.
States may change because of the control word or other internal events. The current
status is displayed in the STATUS WORD. The state machine describes the state of the
controller with regard to user commands and internal error messages.