User Manual CANopen/EtherCAT
59
[Chapter 9]
SINGLE SETPOINT:
When the target position is reached the drive indicates the fact to the master. Then the
drive receives a new setpoint. At each target position the drive is stopped before being
moved on to the next target position.
The two options are controlled by way of the timing of the NEW SETPOINT and CHAN-
GE SET IMMEDIATELY bits in the control word and the SETPOINT ACKNOWLEDGE bit in
the status word. These bits allow a new positioning operation to be initiated even while
the current one is ongoing.
data
new_setpoint
change_set_immediately
setpoint_acknowledge
(1)
(2)
(3)
(4)
(5)
(6)
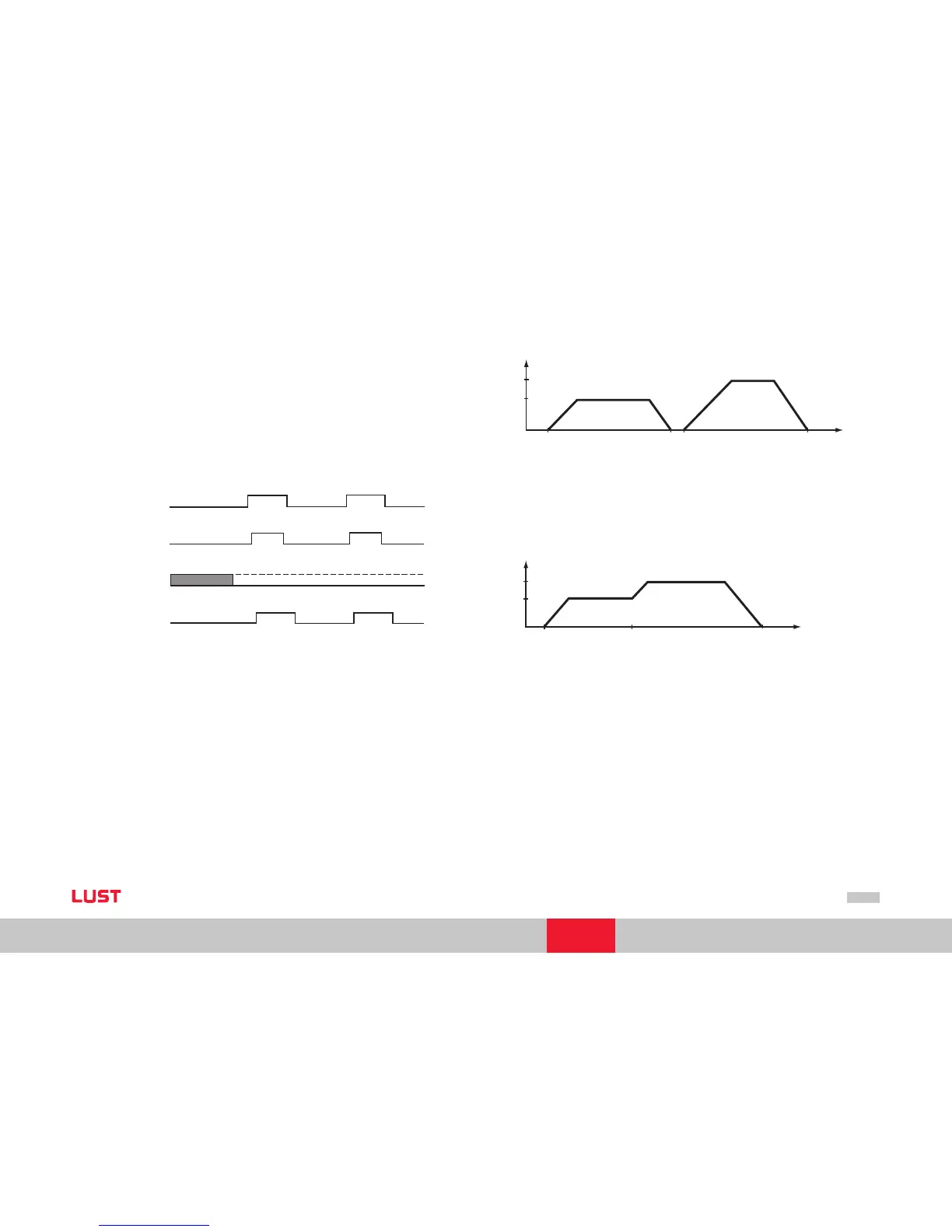
Figure Setpoint transmission from a host computer
If the “CHANGE SET IMMEDIATELY“ bit is set to “0“ (solid line in above diagram) a
SINGLE SETPOINT is expected by the drive (1).
When the setpoint has been transmitted to the drive, the master activates the positio-
ning by setting the ‚New setpoint‘ bit in the control word (2). The drive responds by set-
ting the “Setpoint acknowledge“ bit in the status word (3) once the new data has been
detected and saved. Now the master can delete the “New setpoint“ bit (4). Then the
drive signals by deleting the “set-point acknowledge“ bit that a new setpoint is accepted
(5). In the diagram the mechanism initiates a speed 0 on reaching the target position
at time t1. After the message indicating the target position has been reached, the next
target position can be initiated at time t2.
Figure Single setpoint
If the “CHANGE SET IMMEDIATELY“ bit is set to “1“ (broken line in Figure “Setpoint
transmission“), the new target position is adopted immediately. In the Figure “Change
Set Immediately“ the drive receives the first target position at the time t0. At the time
t1 the drive receives the second target position. The drive immediately implements the
movement to the second target position.
Figure Change set immediately