4-200 Detailed explanation of command words
4MELFA-BASIC V
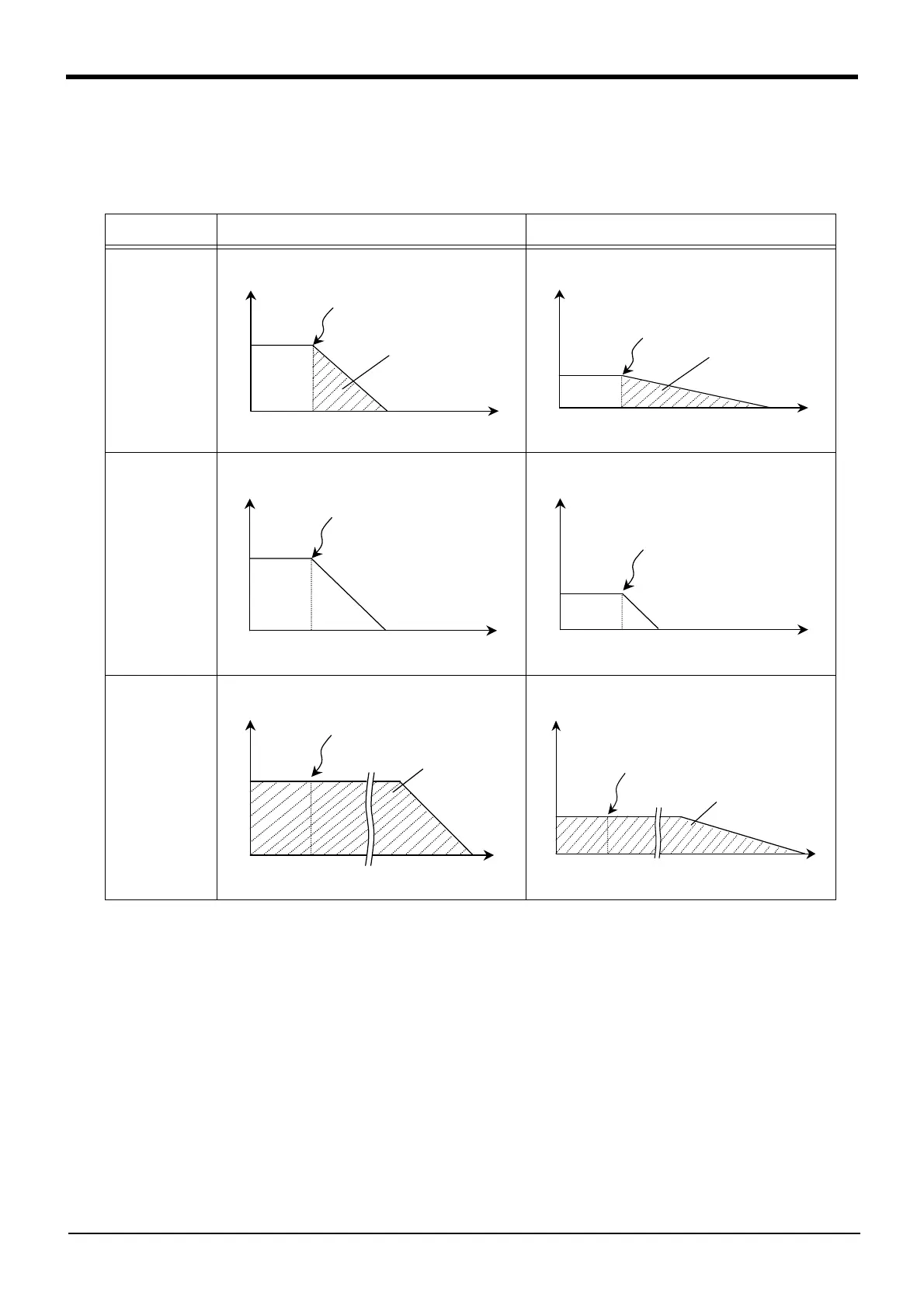
Table 4-16 shows conceptual diagrams that illustrate the effects of the 3 types of program execution stop
commands when the interrupt conditions are met while the robot is moving according to a movement
instruction.
Table 4-16:Conceptual diagram showing the effects of different stop commands
[Related instructions]
Act (Act)
External override 100% (maximum speed) External override 50%
Stop type 1
(If the argument is
omitted)
S1=S2
Stop type 2(S)
Execution com-
plete stop(L)
S3=S4
Speed
Time
Interrupt
Stop distance S1
Decelerate and stop immediately
Speed
Time
Interrupt
Total travel distance S3
 Loading...
Loading...




