4-294 Detailed explanation of command words
4MELFA-BASIC V
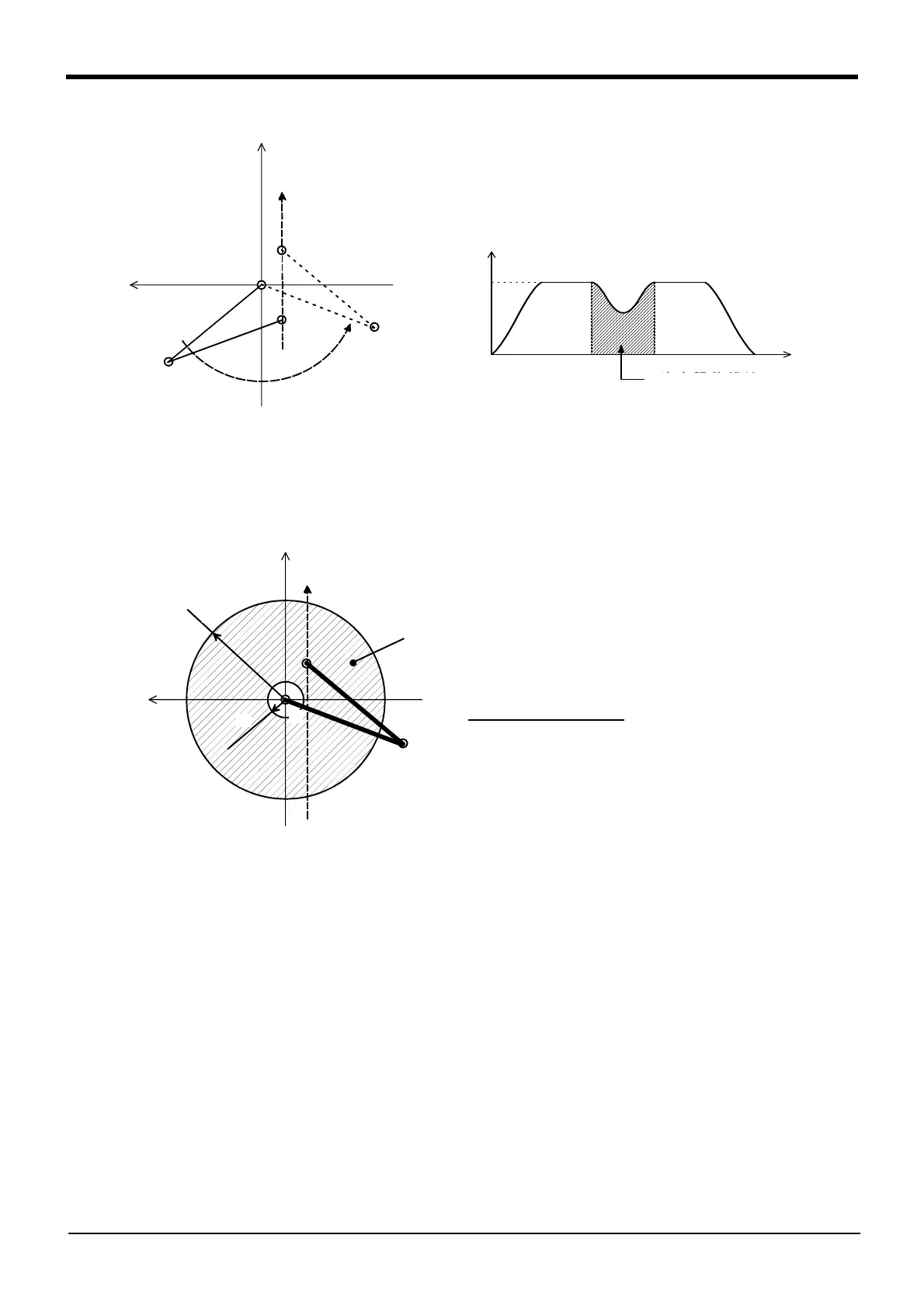
Fig.4-32:Passing through near the origin point
Fig.4-33:The situation of speed at speed-optimization.
(3) This command is valid only in linear interpolation movement. It functions in neither joint interpolation nor
circle interpolation. And, even if the speed optimization function is valid, if the J4 axis does not pass
through the area shown in "Fig. 4-34Speed regulation area and singular point area" by linear interpola-
tion, this does not function.
Fig.4-34:Speed regulation area and singular point area
(4) The initial condition of the speed optimization function at turning ON the power supply can be changed
with parameter SPDOPT. This parameter also limits the models which can be used.
The initial value in the target models is SPDOPT=1 (speed optimization valid).
(5) If the End instruction or a program reset operation is executed, the status of the speed adjustment func-
tion returns to the initial state immediately after the power is turned on.
(6) When the speed adjustment function is enabled, error 2804 will be generated if the XYZ interpolation
by which the J4 axis passes through a singular point area shown in Fig. 4-34 is executed, and the oper-
ation is then suspended.
(7) Even if this instruction is described in a program, it is ignored on models other than the applicable mod-
els.
(8) Even if the speed adjustment function is enabled, an exceeded speed error may be generated if a path
is connected by enabling the Cnt instruction near the origin point, or a XYZ interpolation operation that
drastically changes the posture is executed. In such a case, move the position where a path is con-
nected away from the origin point, or adjust the speed by using the Ovrd instruction.
(9) In the case of a XYZ interpolation that operates slightly in the horizontal direction but operates signifi-
cantly in the vertical direction, the operation speed may degrade drastically when the speed adjustment
function is enabled vs. when it is disabled. In such a case, disable the speed adjustment function, or
operate by using a JOINT interpolation (Mov command).
Speed
Origin
Time
Speed regulation area
Linear interpolation
Distance of R1 and R2
RH-3FHR series
R1=240.0mm, R2=1.0mm
Inside of R2:Singular point area (positioning and pas-
sage only by joint interpolation are possible)
R1-R2: Speed regulation area
Linear interpolation
 Loading...
Loading...




