4MELFA-BASIC V
Detailed explanation of Robot Status Variable 4-353
Always make interlock of signal to take synchronization. Failure to observe this
could lead to cause of malfunction by the signal transmitted incorrectly.
[Supplement]
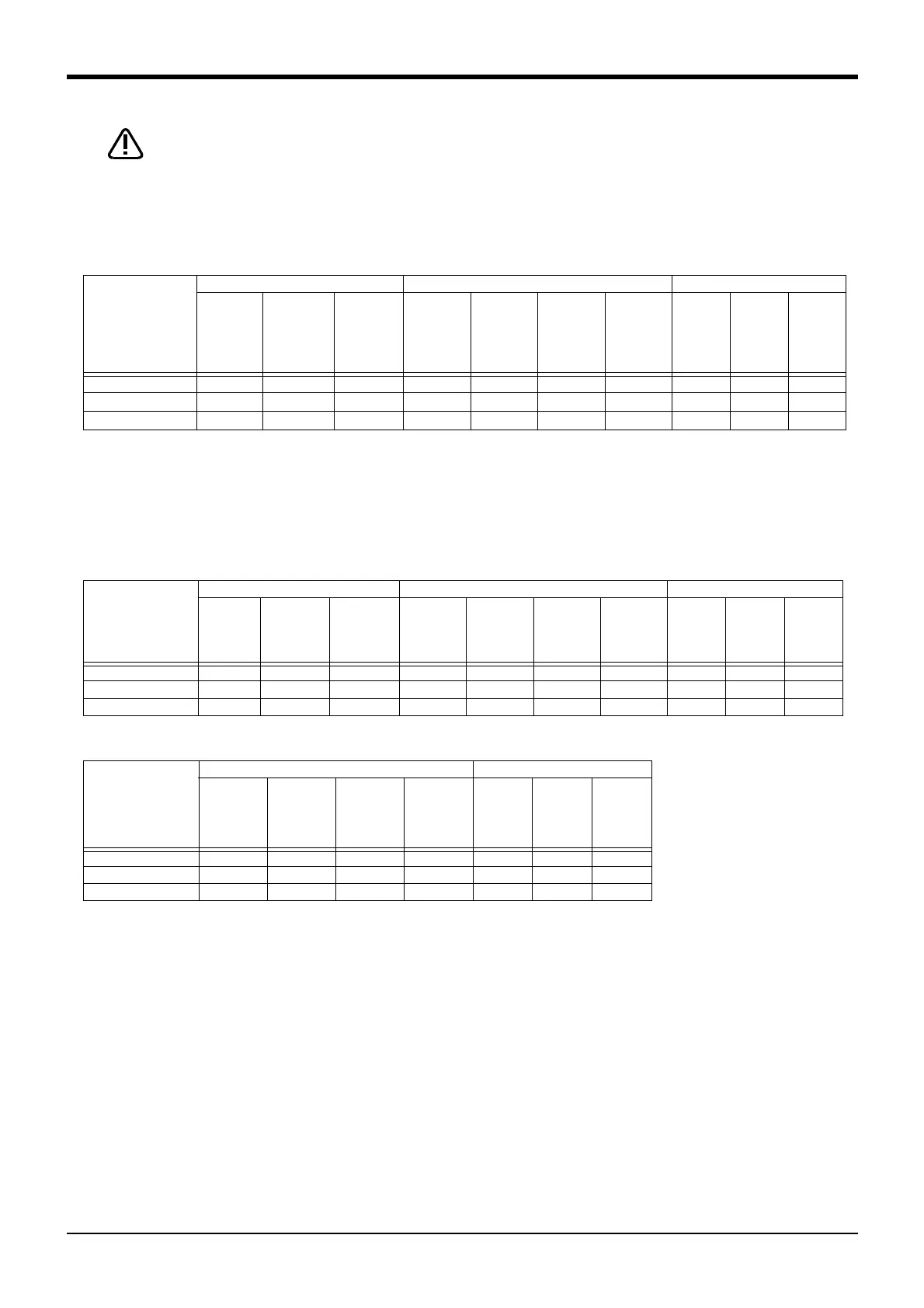
Table 4-26:<Numeric value 1>
Table 4-27:<Numeric value 2>, <Numeric value 3>, <Numeric value 4>
Table 4-28:<Numeric value>
[Related status variable]
M_Out32
[Related instructions]
Def IO (Define IO)
[Related parameter]
SYNCIO
O: The available, X: unavailable
Bit width
constant types Numeric variables types Other variables
Numeric
value
Note1)
Ex.)12
Note1) The real value is rounded off.
Binary num-
ber
Ex.)&B1100
Hexadeci-
mal number
Ex.)&HC
Integer
Ex.)M1%
Long-pre-
cision inte-
ger
number
Ex.)M1&
Single-pre-
cision real
number
Note1)
Ex.)M1!
Double-
precision
real numbe
Note1)
Ex.)M1#
Positio
Note1)
Note2)
Ex.)P1.X
Note2) If the value of the variable is the angle, the unit will be processed by the radian. (The elements of A, B and C of position variable, and all elements of joint variable)
Therefore, designation of the signal number is very difficult. The display of the monitor etc. is converted into the degree, and the same value as the setting value
displayed.
Example)
It is processed by value "0", even if it sets "8" as the value of P1.A (The input in the key by T/B etc.) to specify the input signal No.8. The result is
"0" when 8 degree is converted to radian (0.14) and rounded off. Because the unit of the element X, Y, and Z of the position variable is "mm", there is no such
condition.
Joint
Note1)
Note2)
Ex.)J1.J1
Charac-
ter string
Ex.)C1$
M_Out OO OOOOOOXX
M_Outb/M_Out8 O O O O O O O O X X
M_Outw/M_Out16 O O O O O O O O X X
O: The available, X: unavailable
Bit width
constant types Numeric variables types Other variables
Numeric
value
Ex.)12
Binary
number
Ex.)&B1100
Hexadeci-
mal number
Ex.)&HC
Integer
Ex.)M1%
Long-pre-
cision inte-
ger
number
Ex.)M1&
Single-pre-
cision real
number
Ex.)M1!
Double-
precision
real numbe
Ex.)M1#
Positio
Ex.)P1.X
Joint
Ex.)J1.J1
Charac-
ter string
Ex.)C1$
M_Out O O O O X X X XXX
M_Outb/M_Out8 O O O O X X X X X X
M_Outw/M_Out16 O O O O X X X X X X
O: The available, X: unavailable
Bit width
Numeric variables types Other variables
Integer
Ex.)M1%
Long-preci-
sion integer
number
Ex.)M1&
Single-pre-
cision real
number
Ex.)M1!
Double-
precision
real numbe
Ex.)M1#
Positio
Note1)
Ex.)P1.X
Note1) If the value of the variable is the angle, the unit will be processed by the radian. (The elements of A, B and C of
position variable, and all elements of joint variable) The display of the monitor etc. is converted into the degree and
displayed
Joint
Note1)
Ex.)J1.J1
Charac-
ter string
Ex.)C1$
M_Out O O O O O O X
M_Outb/M_Out8 O O O O O O X
M_Outw/M_Out16 O O O O O O X
 Loading...
Loading...




