5Functions set with parameters
Interference avoidance function 6-531
When the posture is all axis = 0 degrees a simulated component’s XYZ direction matches the base coordi-
nate system.
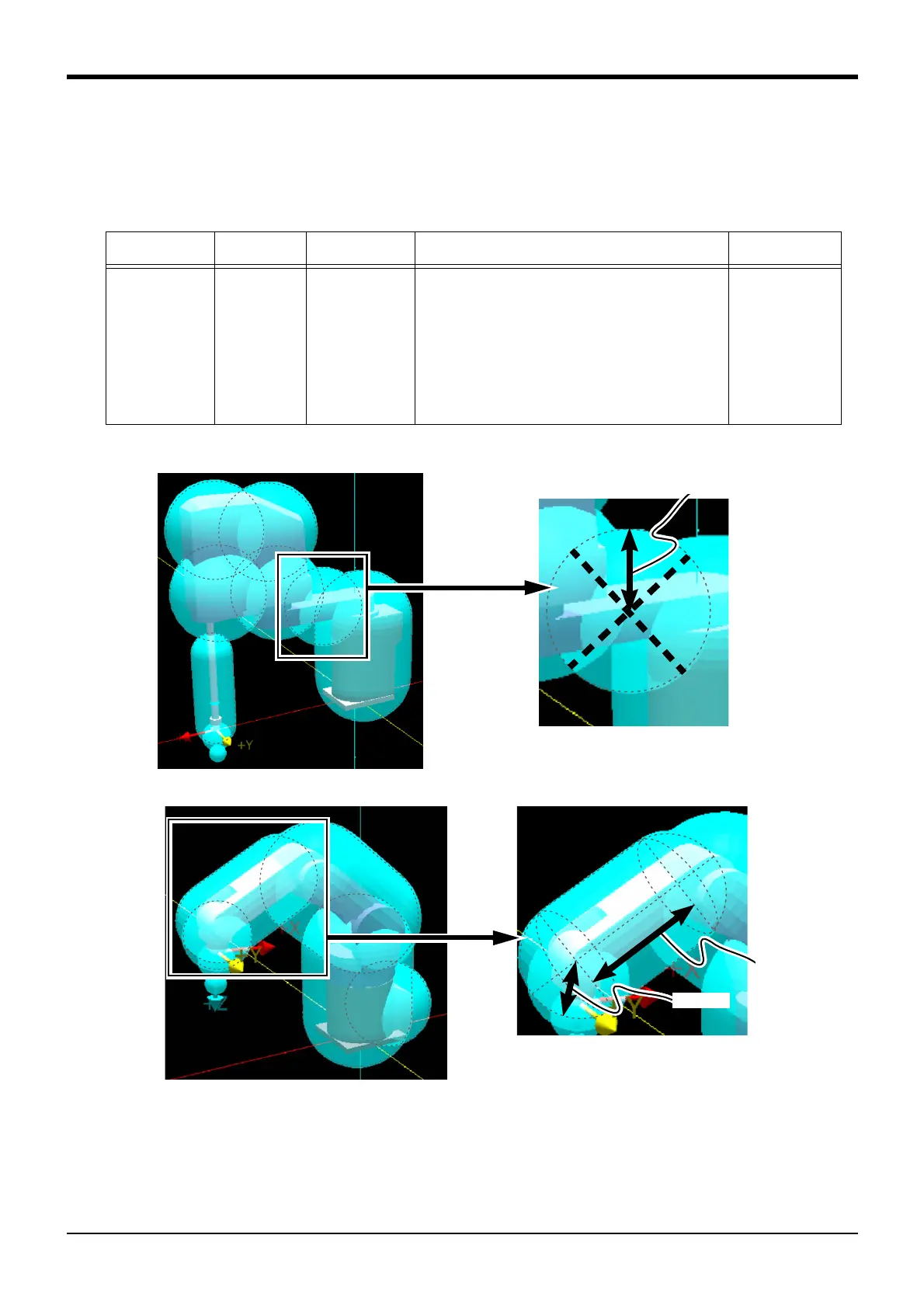
<3>Simulated component size: CAVSZA1 to 8
Table 5-33:Simulated component setting parameter (Robot arm: CAVSZA1 to 8)
Fig.5-22:Simulated component size (supplement)
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation Factory setting
Simulated compo-
nent (robot arm)
size
CAVSZA1 to 8 Real number 4 Set the size of each simulated component. (Each
simulated component corresponds to the last digit (1 to
8) of the parameter name.)
1st element: Radius (mm)
2nd element: Length (mm)
3rd element: Fixed to 0
4th element: Fixed to 0
Note) Setting of length is unnecessary if shape is the
spheric.
Radius
<RH-F series>
<RV-F series>
Set the size of a cylinder simulated com-
ponent as a radius and a length.
Length
Radius
Set the size of a sphere simulated
component as a radius.
 Loading...
Loading...




