6.
PROGRAMMING
/MELSEC-A
-._
[
1
]
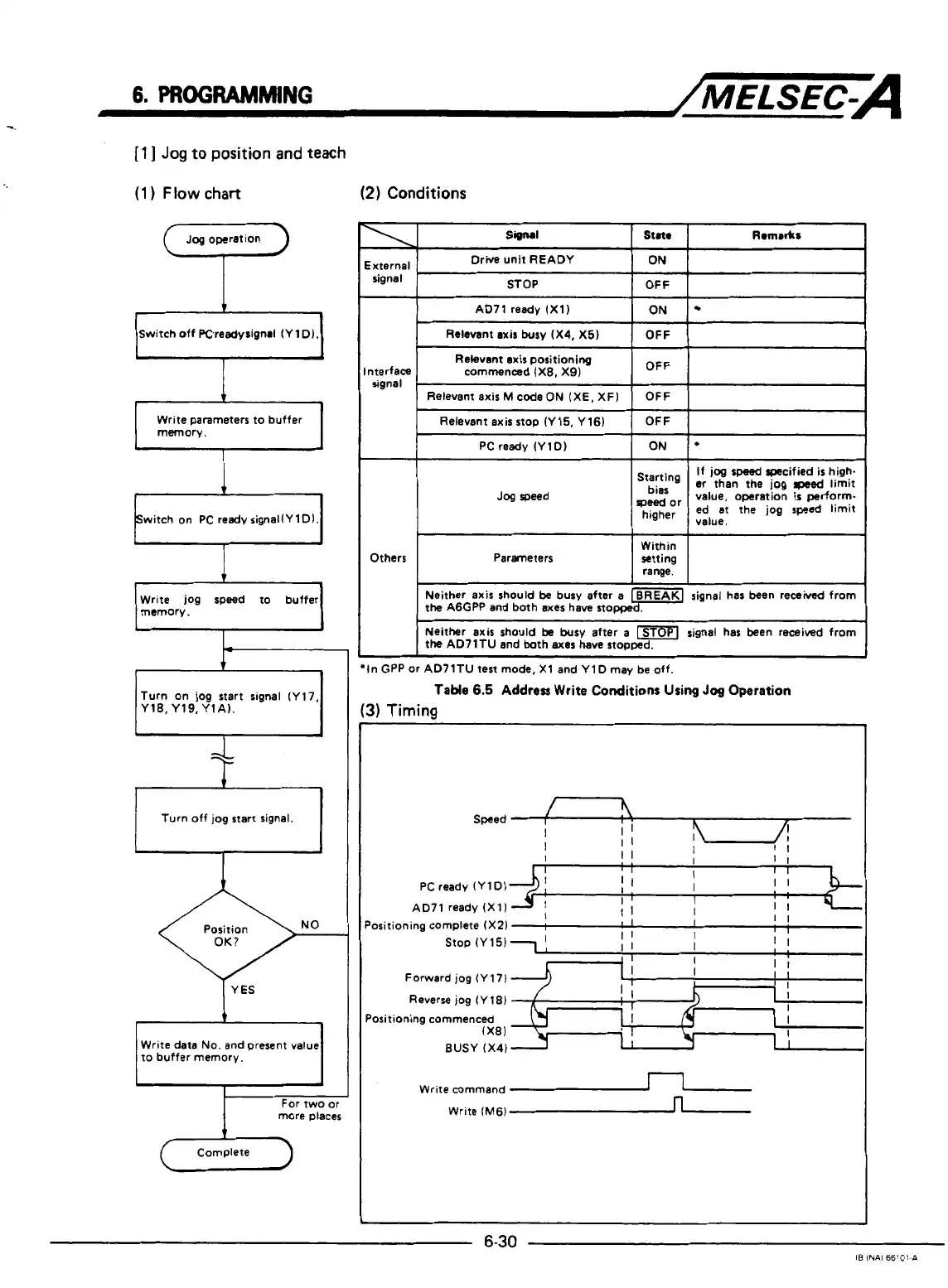
Jog
to
position
and
teach
(1
1
Flow
chart
0
Jog
operation
Iswitch off PCreadysignol CYlD).I
1
Write parameters to buffer
witch on PC ready signal(Y1DI.
Write jog speed to buffer
memory,
Turn on jog start signal (Y17,
Y18, Y19. YlA).
e.,
Position
I
YES
Write data
No.
and present value
to buffer memory.
more places
(2)
Conditions
Signal
stab
Romallcr
ixternal
signal
Drive
unit READY ON
STOP OFF
AD71 ready (X11 ON
'
Relevant axis
busy
(X4, X5) OFF
I
Relevant axis positioning
nterface commenced (X8, X9)
I
OFF
I
1
Relevant axis Mcode
ON
(X€, XF)
I
OFF
I
Jog
weed
value.
Others Parameters
Within
setting
range.
signal has been received from
Neither axis should
be
busy
after
a
signal has been received from
tk
AD71TU and both axes have stopped.
~~ ~~ ~~~~
In GPP or AD71TU test mode, X1 and YlD may be off.
Table
6.5
Address Write Conditions Using
Jog
Operation
3)
Timing
Speed
I
/
I I1
I
I
I
I
I1
I
II
I
11
I
11
'ositioning complete
(XZI
I
II
II
I
Stop (Y15)l
1
I1
I
Forward
jog
(Y17J
-pp&
Reverse jog (Y18J
(X81
I
'ositioning commenced
BUSY
(X4J
Write command
Write
IM6))
 Loading...
Loading...





