EMC INDUSTRIAL GROUP LTD I/O Function Table
MW93A_IM_ALL_SV6.09f_en 55/59
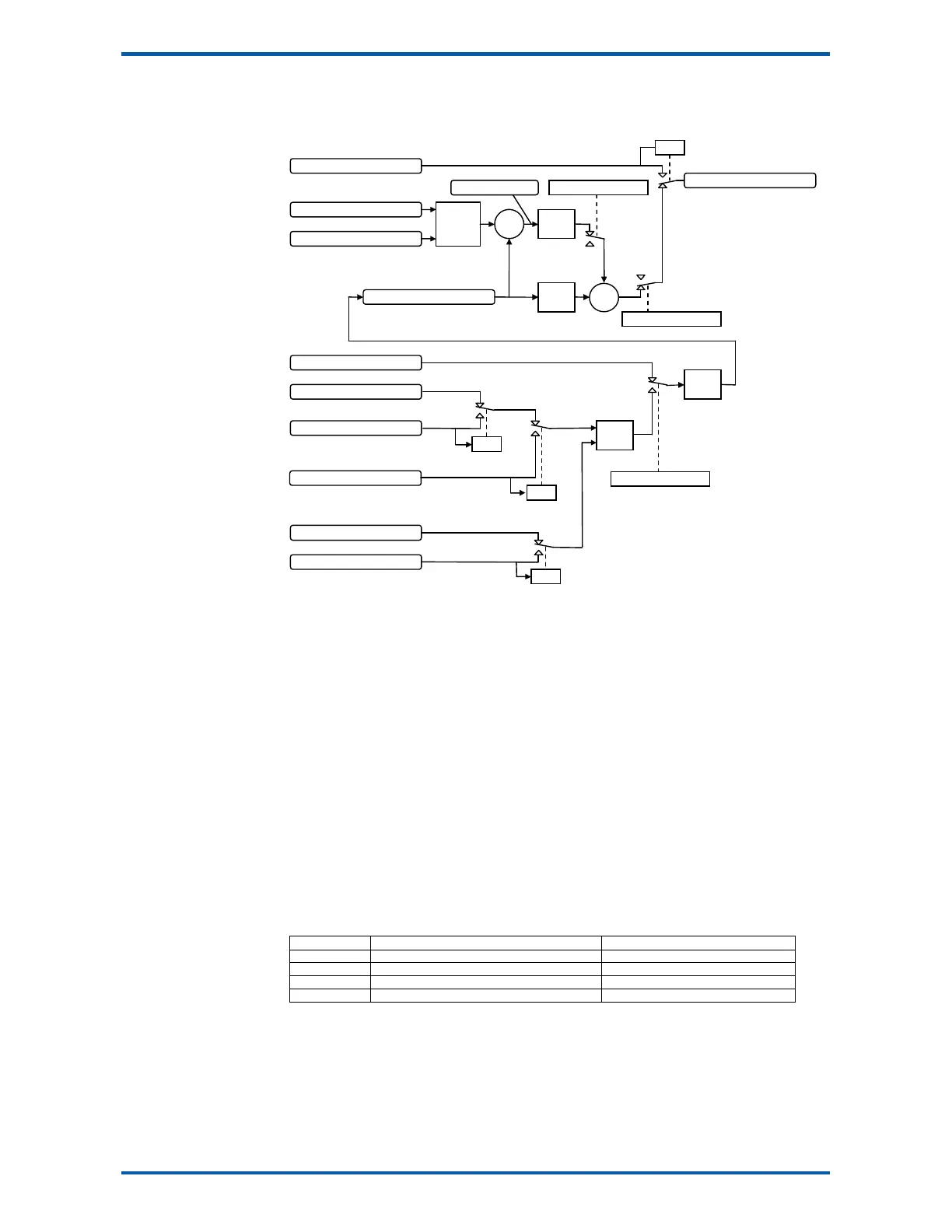
OPERATING DETAILS
Setpoint & Speed Demand Signals
Modbus Access
The communications ports of the ModWeigh Controllers (COM1 and COM2) use Modbus protocol. This
can be used to access any data value and any user setting.
The Modbus protocol supported is RTU. (ASCII mode is not supported). Transmission is with 8 data bits,
no parity and 2 stop bits. The following function codes are supported;
3 - read holding registers
4 - read input registers
6 - preset single register
16 - preset multiple registers (10 hex)
23 - read/write multiple registers (17 hex)
Data can be accessed as floats (4 bytes) or integers (2 or 4 bytes). Floats are preferred as the data is
stored in engineering units. The following table shows how the addresses shown in the setup summary
are translated into Modbus register addresses. (Note with Modbus protocol, the actual address transmit-
ted is one less than the register address. With some systems, you must specify an address one less
than expected).
Address Modbus Register Address Data description
1000 to 4999 Address 1000 to 4999 Macro strings
8000 to 8999 6000 + (Address - 8000) / 2 6000 to 6499 Integer (16 bit) (limited by integer range)
8000 to 8999 7000 + (Address - 8000) 7000 to 7999 Long integers (32 bit words)
8000 to 8999 Address 8000 to 8999 Float (IEEE 4 byte reals)
The interface registers starting at address 8000 contain the most common data required for Modbus ac-
cess.
Modbus registers are 2 bytes, so 4 byte floats or 4 byte integers are stored in two consecutive registers.
The following tables provide information for Modbus access to the transmitter.
[8722]
[8470]
limit
[8032]
[8790]
[8472]
[8030]
multiply
[6]
[8792]
[8028]
[8740]
[8908]
calculate
flowrate
PI
Control
forward
[5]
[55]
-
+
[8798]
[8788]