30
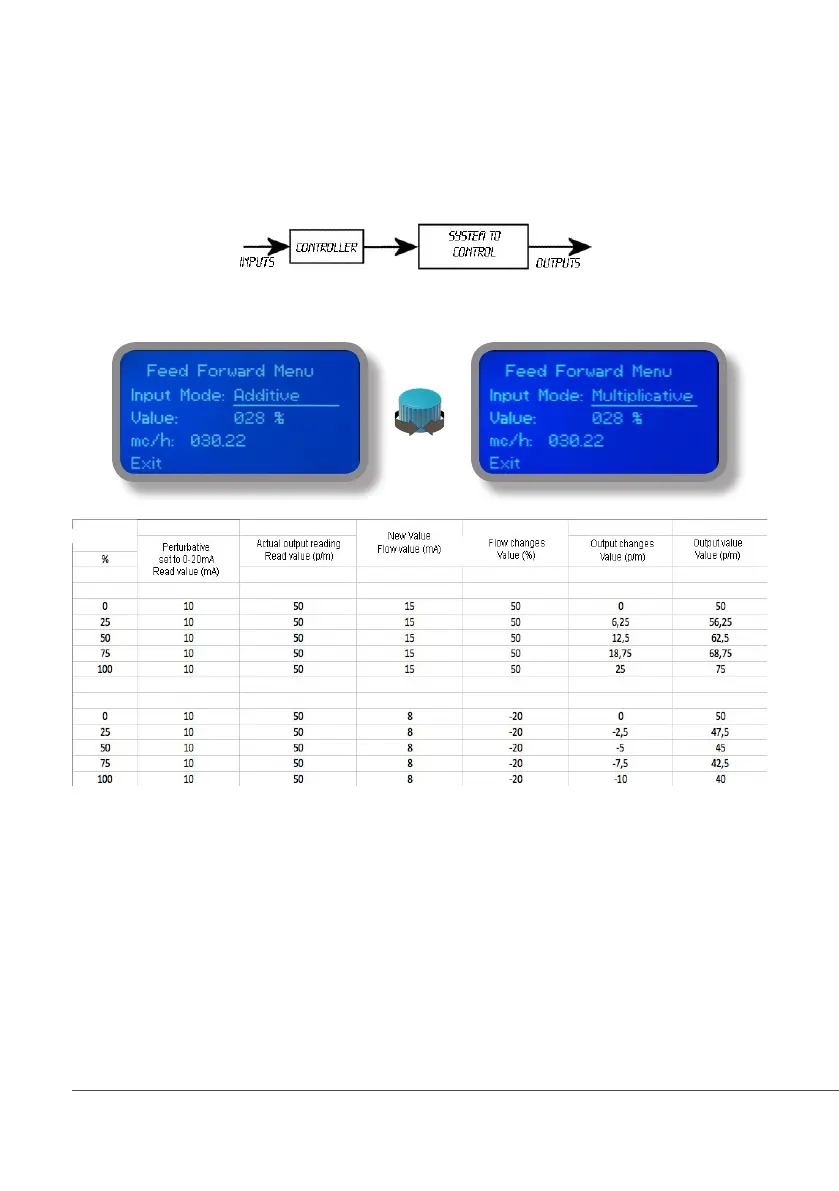
25 “Feed Forward”, PID loop
The PID controller algorithm involves three separate constant parameters, and is accordingly sometimes called three-
term control: the proportional, the integral and derivative values, denoted P, I, and D. Simply put, these values can be
interpreted in terms of time: P depends on the present error, I on the accumulation of past errors, and D is a prediction
of future errors, based on current rate of change. The weighted sum of these three actions is used to adjust the process
via a control element such as the position of a control valve, a damper, or the power supplied to a heating element.
This function manages all instrument outputs based on changes read by mA input and multiply value referring to % and
mc/h read by the module.