Add the code to assign ErrorClearFromNX to the ResetSignalFromNX local
variable.
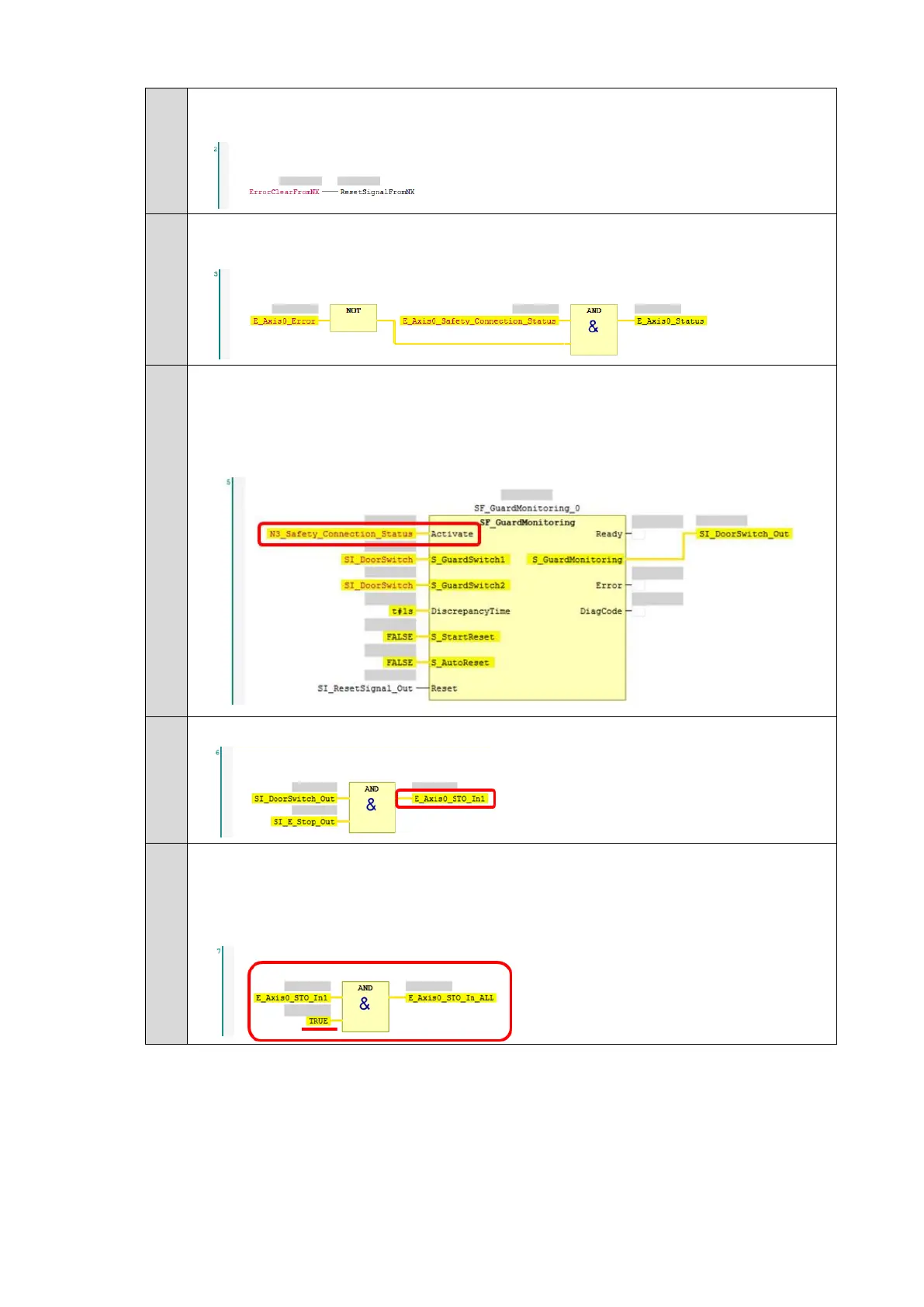
Add the following code.
This is used to enable the function block that uses safety functions of the Servo Drive.
Set the input parameter to the Activate input variable to
N3_Safety_Connection_Status in the SF_GuardMonitoring function block.
When the FSoE communications are established for the NX-SID800 Safety Input Unit,
this function block is enabled.
Change the output variable from E_Axis0_STO_IN to E_Axis0_STO_IN1.
Add the following code.
The STO command is enabled by the emergency stop input or a safety-door switch, and
sometimes by another device such as a robot. When the other device enables the STO
command, assign the STO signal from the other device to TRUE.
 Loading...
Loading...





