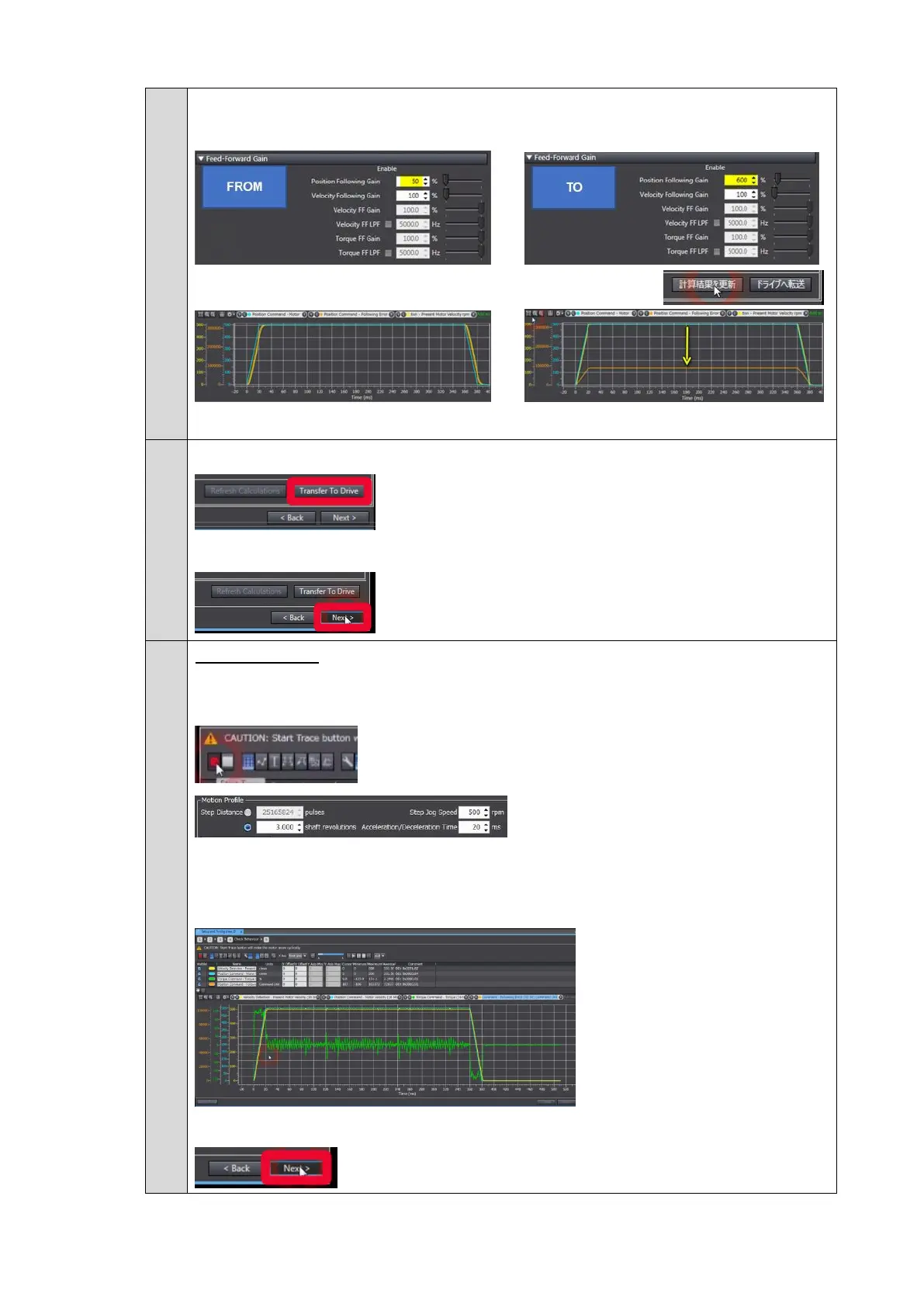
If your application requires a small following error, here is an example of position
following gain adjustment.
The following error has been reduced.
Check Behavior (Wizard Step 4)
Click the Start Trace Button. (The Servomotor will run based on the motion profile set
in Wizard Step 3 (estimation of load characteristics).)
(Motion profile set in Wizard Step 3)
The traced data is displayed in charts.
- Velocity command, velocity detection, following error, and torque
When satisfied with the result, click the Next Button.
 Loading...
Loading...





