In this operation, the operation amount is proportional to the percentage of change in the deviation.
Because using only the PI operation is time-consuming, the D operation is used to effectively com-
pensate for the disadvantage in responsiveness.
300EHex-06Hex
300EHex-06Hex
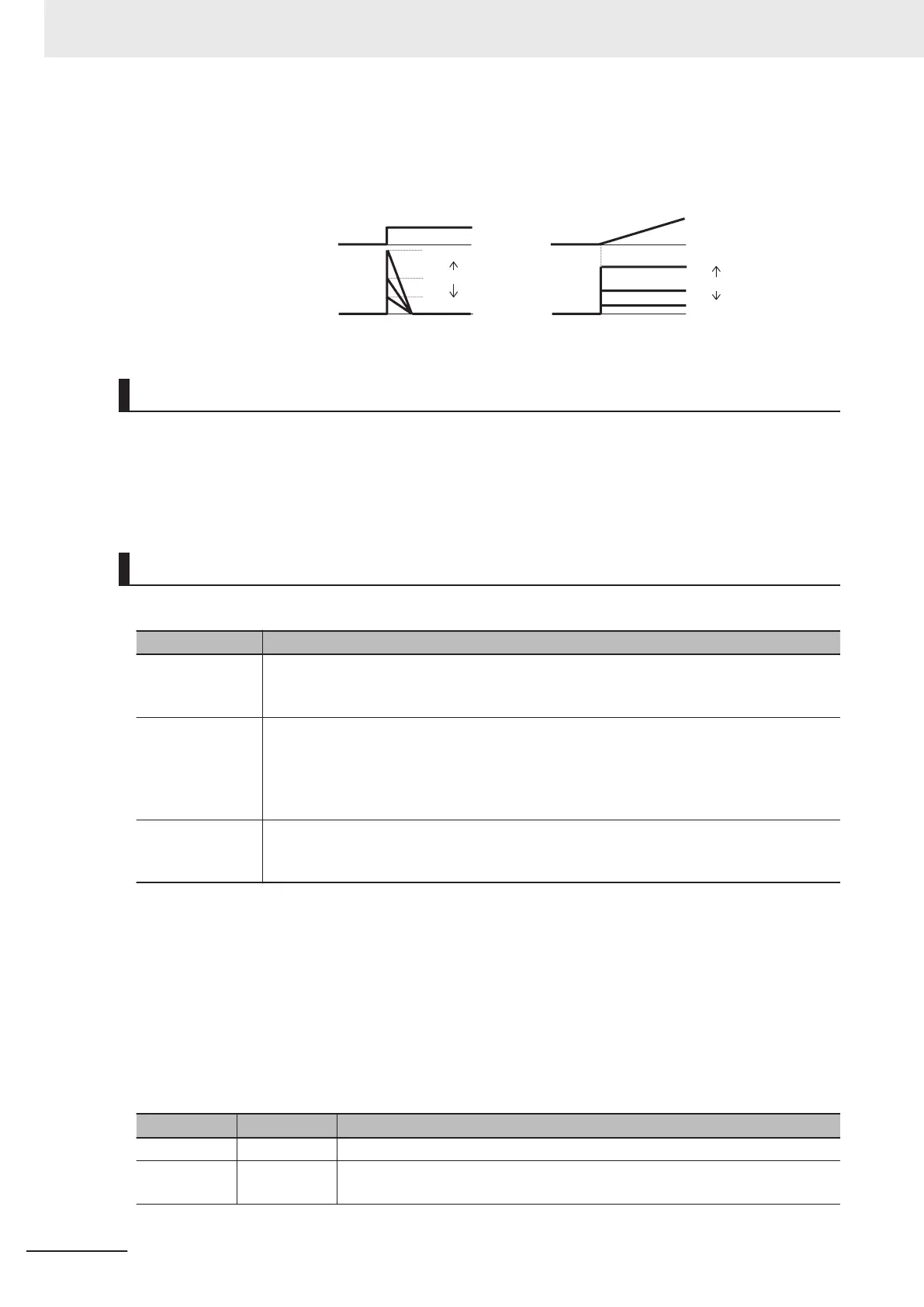
Target value
Control value
Step transition Ramp transition
Large
Small
Large
Small
PID Normal Operation/Reverse Operation
Since normal operation or reverse operation can be selected for the output of PID process control, the
fluctuations in the motor rotation speed with respect to the deviation (difference between the command
value and feedback value) can be set. Switching of normal operation and reverse operation by an ex-
ternal signal (21:IVS (Normal/Inverse switching)) is also possible.
PID command
This command is used to select the means for setting the command values of PID control.
300EHex-03Hex Function
1
PID command 1 (Analog input: Terminal [AI1])
Setting based on the voltage value (0 to ±10 VDC, PID 100% command/±10 VDC) input to
the terminal [AI1].
3
PID command by the UP/DOWN commands
With the UP command “UP” and the DOWN command “DOWN,” the PID control com-
mands 0% to 100% can be set to a value obtained by conversion to a physical quantity by
PID Control Minimum Scale (3024Hex-08Hex) and PID Control Maximum Scale
(3024Hex-07Hex).
4
Command by communication
Communication parameter (3002Hex-0EHex): T
ransmission data 20000d/100% PID com-
mand
• PID command 1 by analog input (300EHex-03Hex = 1)
The PID command value can be set arbitrarily by multiplying the gain with the voltage value input to
the analog input (terminal [AI1]), and then adding the bias. Polarity selection, filtering and offset ad-
justment are also possible. In addition to the setting of 300EHex-03Hex, “3: PID command” must be
selected for Input T
erminal [AI1] Function Selection (3005Hex-3EHex).
• PID command by UP/DOWN control (300EHex-03Hex = 3)
If UP/DOWN control is selected as the PID control command, and either the UP terminal or DWN
terminal is turned ON, the command value of PID control fluctuates in the range of maximum scale
to minimum scale accordingly.
UP DWN Operation
OFF OFF The current command values of PID control are retained.
ON OFF
The command values of PID control increase according to the change rate
from 0.1%/0.1 s to 1%/0.1 s.
8 Other Functions
8-114
M1 Series EtherCAT Type User’s Manual (I670)
 Loading...
Loading...


