UP DWN Operation
OFF ON
The command values of PID control decrease according to the change rate
from 0.1%/0.1 s to 1%/0.1 s.
ON ON The current command values of PID control are retained.
In the inverter, the PID control values set by the UP/DOWN control are maintained internally, and
when the operation is resumed (including when the power is turned ON), the control is started from the
previous PID command value.
When analog input is applied to the PID command value, the following gains, biases, filters and offsets
are applicable.
Input ter-
minal
Input range
Bias Gain Polarity
selection
(Range
selec-
tion)
Filter Offset
Bias
Base
point
Gain
Base
point
AI1
0 to +10V,
-10 to +10V
3006Hex-
38Hex
3006Hex-
39Hex
3006Hex-
21Hex
3006Hex-
23Hex
3006Hex-
24Hex
3006Hex-
22Hex
3006Hex-
20Hex
The following processing is performed during polarity selection 3006Hex-24Hex.
3006Hex-24Hex: Set the input range of the AI1 terminal.
3006Hex-24Hex Terminal input specifications
0 -10 to +10V,
1 0 to +10V (A negative voltage is considered as 0V.)
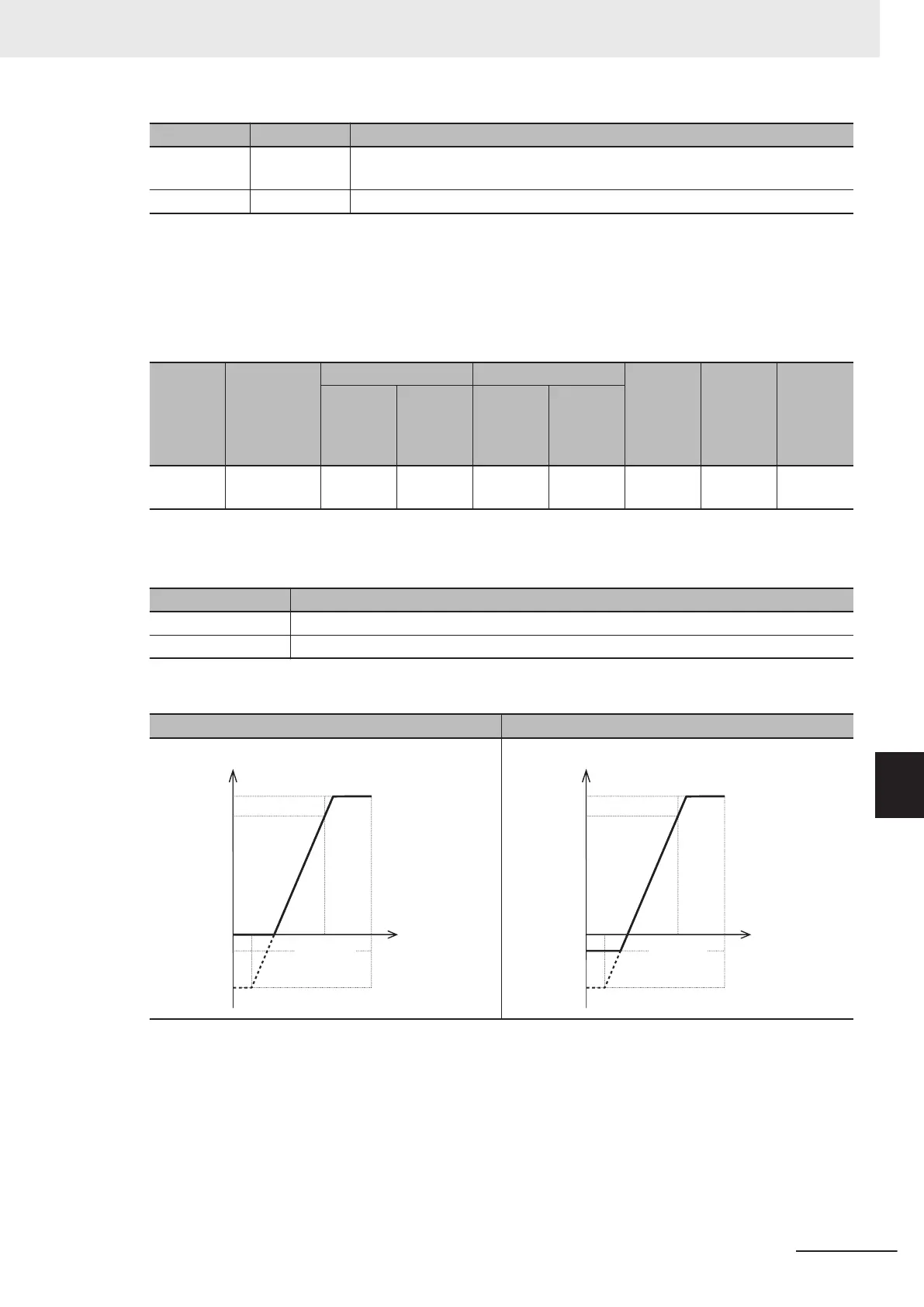
An example of PID process control is shown below.
Used for unipolar Used for bipolar
100%
Gain
Bias
0%
-10%
Bias
base point
Gain
base
point
100%
Analog
input
A point
B point
The value after conversion becomes 0% to 100% or more.
The value after conversion becomes -100% to 100% or more.
100%
Gain
Bias
0%
-10%
Bias
base point
Gain
base
point
100%
Analog
input
A point
B point
An example of dancer control is shown below.
8 Other Functions
8-115
M1 Series EtherCAT Type User’s Manual (I670)
8-9 Other Operation Functions
8
8-9-13 PID Function
 Loading...
Loading...


