Index
(hex)
Sub-
index
(hex)
Pa-
rame-
ter No.
Function name Monitor or data range
Default
data
Set-
ting
dur-
ing
RUN
Unit
PDO
map
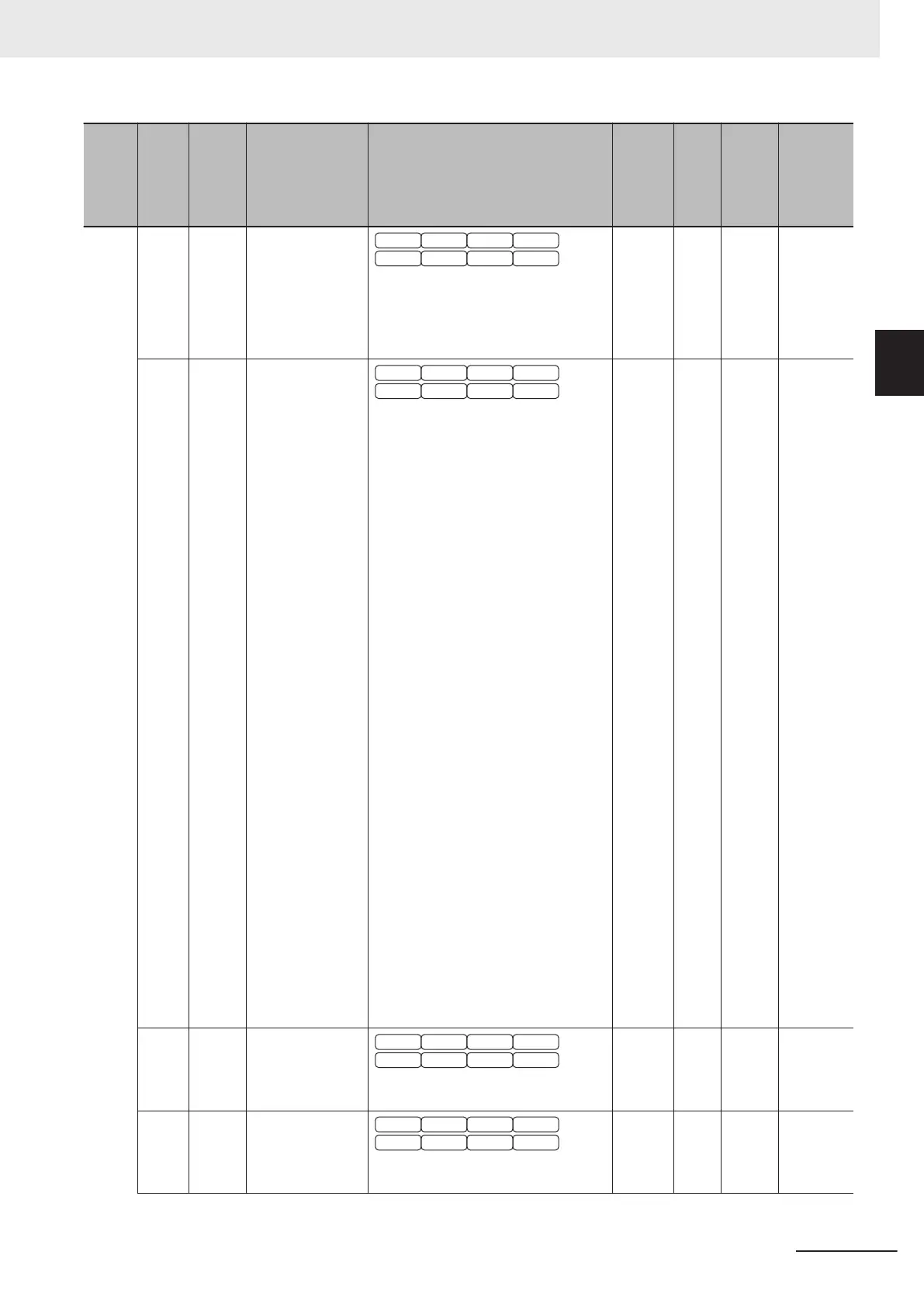
4A M73 PID Output Moni-
tor
V/f DTV
PG V/f PG DTV
SLV PGV
PM SLV PM PGV
-32768 to 32767
-164% to 164% +20,000 or -20,000 =
±100%
0 --- --- Possible
(TxPDO)
4B M74 Running Status 2
Monitor
V/f DTV
PG V/f PG DTV
SLV PGV
PM SLV PM PGV
0000 to FFFF hex
Bit 15: Motor type (1: PM motor, 0:
Induction motor)
Bit 14: During EN circuit diagnosis
Bit 7: During speed control (1 during
control)
Bit 5 to 4: Selected motor
00: 1st motor
01: 2nd motor
10: Reserved
1
1: Reserved
Bit 3 to 0: Control method
0000: V/f control without slip
compensation
0001: Dynamic torque vector
control
0010: V/f control with slip com-
pensation
0011: V/f control with speed sen-
sor
0100: Dynamic torque vector
control with speed sensor
0101: Vector control without
speed sensor
0110: Vector control with speed
sensor
0111: Torque control (Vector con-
trol without speed sensor)
1000: Torque control (Vector con-
trol with speed sensor)
0 --- --- Possible
(TxPDO)
4D M76 Service Life of
Main Circuit Ca-
pacitor Elapsed
Time
V/f DTV
PG V/f PG DTV
SLV PGV
PM SLV PM PGV
0 to 65,535
0 --- 10 h Possible
(TxPDO)
4E M77 Service Life of
Main Circuit Ca-
pacitor Remain-
ing T
ime
V/f DTV
PG V/f PG DTV
SLV PGV
PM SLV PM PGV
0 to 65,535
0 --- 10 h Possible
(TxPDO)
Appendices
A-59
M1 Series EtherCAT Type User’s Manual (I670)
A-4 Lists of Manufacturer Specific Objects 2
(Inverter Parameters)
A
A-4-1 M Group Parameter List (Monitor 1)
 Loading...
Loading...


