8.7 PID setting level (l.pid)
8-31
Setting data
These settings are used to store PID values in each PID set. If AT is run, the values are set automatically.
P action: Control action using an MV proportional to the deviation.
I action: Control action using output that is proportional to the time
integral of the deviation. P action causes an offset, and thus
it is used in combination with I action. As time elapses the
offset disappears and the controlled temperature and SP
equalize.
D action: Control action using output that is proportional to the time
derivative of the input. P action and I action serve to correct
the control result and thus respond slowly to sudden temper-
ature changes. D action corrects control by adding an MV
that is proportional to the slope of the temperature change.
• For ON/OFF control, set the proportional band to "0.0". "0.0" cannot
be selected on a position proportional type.
• For P control or PD control, set the integral time to "0.0". "0.0"
cannot be selected on a position proportional type when performing
floating control or when "Operation at potentiometer error" is set to
"Continue".
● Related setting data
"AT Execute/Cancel" (Adjustment level) (P.8-13)
• Use "MV upper limit" and "MV lower limit" to set upper- and lower-
limits for the MV. When the unit calculates an MV that is outside of
the upper and lower limits, the upper or lower-limit is output.
• MV upper limit
The setting range differs for standard control and heating/cooling
control.
The cooling MV of heating/cooling control is expressed as a
negative value.
PID
∗
Proportional band
PID
∗
Integral time
PID
∗
Derivative time
(
∗
: 1 to 8)
∗ .p
∗ .i
∗ .d
Advanced PID control
CH
l.pid
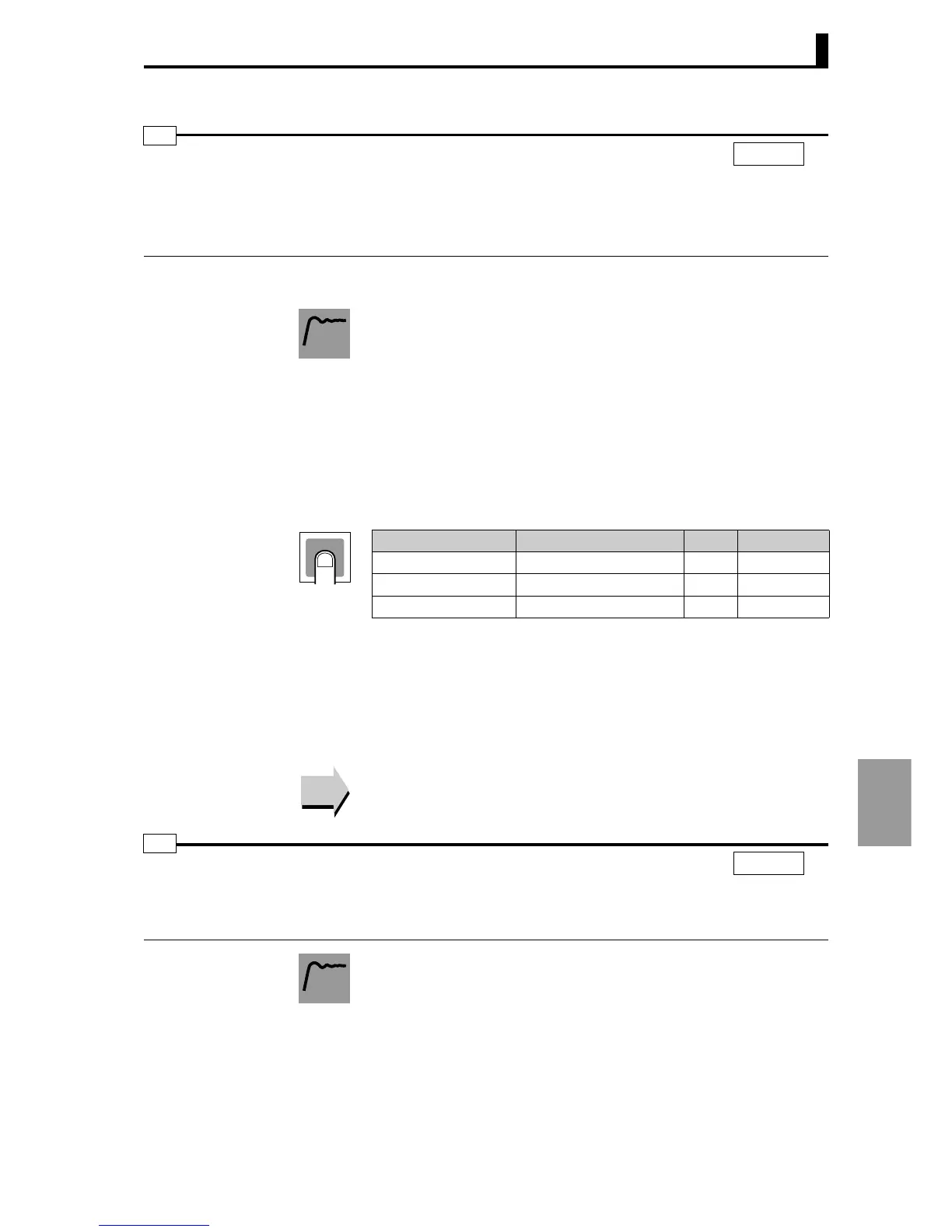
Function
Setting
Setting data Setting range Units
Default value
Proportional band (P) 0.00 to 999.99 %FS 10.00
Integral time (I) 0.0 to 3999.9 Sec 233.0
Derivative time (D) 0.0 to 3999.9 Sec 40.0
Reference
Reference
PID∗ MV upper limit
PID
∗ MV lower limit
(
∗: 1 to 8)
∗ .ol-h
∗ .ol-l
Advanced PID control
CH
l.pid
Function
 Loading...
Loading...






