5-30
5-6 Fully-closed Control
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
5
Basic Control Mode
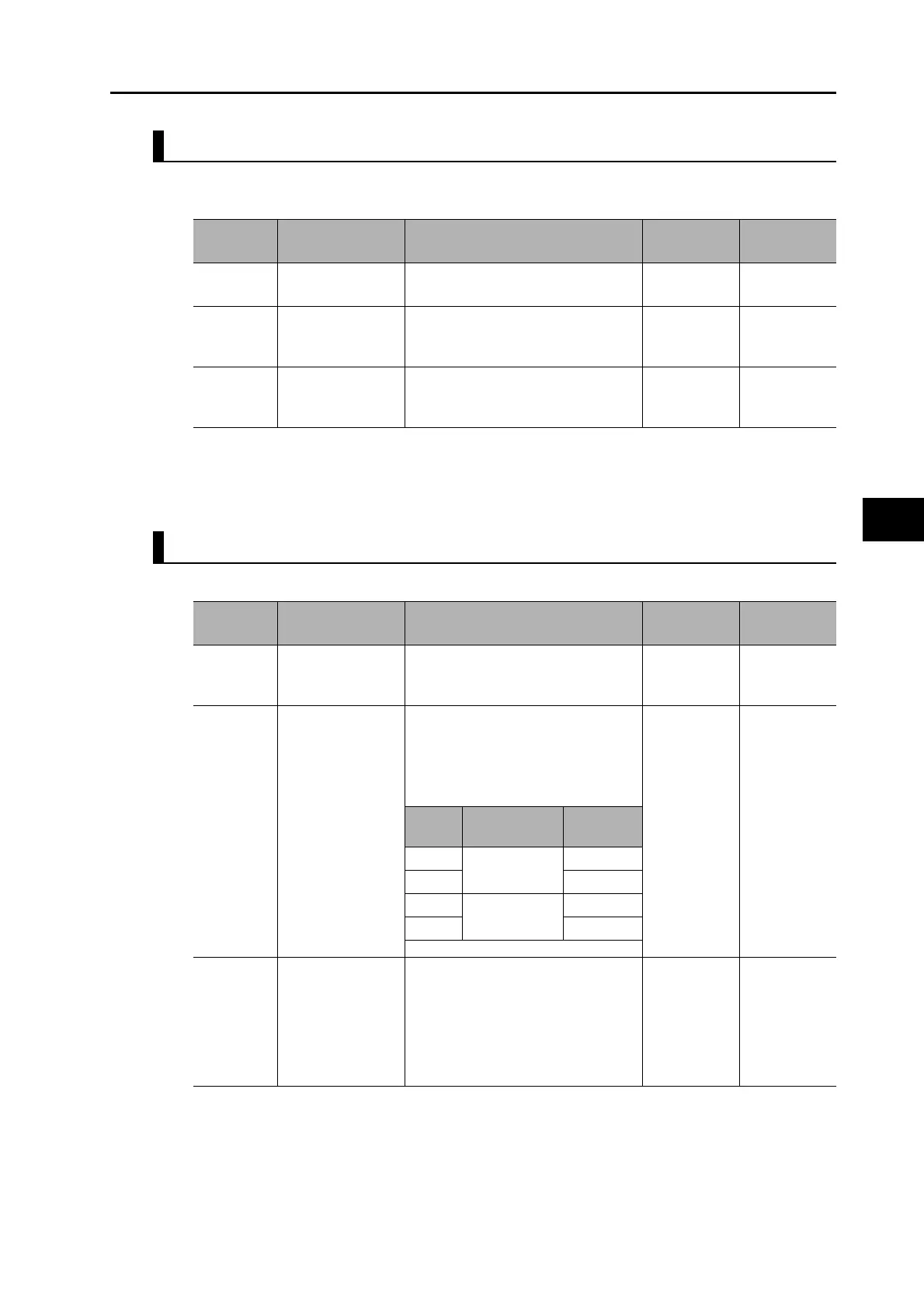
Electronic Gear Function (Pn008, Pn009, Pn010)
This function sets the position command for the position control part a value calculated by
multiplying the pulse command input from the Host Controller with the set electronic gear ratio.
For details on the electronic gear function, refer to "6-4 Electronic Gear Function"(P.6-10).
For fully-closed control, set the Electronic Gear Integer Setting (Pn008) to 0, and set the Electronic
Gear Ratio Numerator 1 (Pn009) and Electronic Gear Ratio Denominator (Pn010).
Encoder Dividing Function (Pn011, Pn012, Pn503)
The number of pulses can be set for the encoder signals output from the drive.
For details on encoder dividing function, refer to "6-5 Encoder Dividing Function"(P.6-14).
Parameter
number
Parameter name Explanation
Setting
range
Unit
Pn008
Electronic Gear
Integer Setting
Set the number of command pulses
corresponding to 1 motor rotation.
0 to 2
20
Pulse
Pn009
Electronic Gear
Ratio Numerator 1
Set the numerator of the electronic
gear ratio for the command pulse
input.
0 to 2
30
−
Pn010
Electronic Gear
Ratio
Denominator
Set the denominator of the electronic
gear ratio for the command pulse
input.
1 to 2
30
−
Parameter
number
Parameter name Explanation
Setting
range
Unit
Pn011
Encoder Dividing
Numerator
Set the number of phase A and
phase B output pulses, respectively
per motor rotation.
1 to 262144 Pulse/r
Pn012
Encoder Output
Direction
Switching
Selection
Select the phase B logic for pulse
regeneration output and the output
source. For fully-closed control,
select an external encoder for the
output source.
0 to 3 −
Pn503
Encoder Dividing
Denominator
When the number of output pulse per
rotation is not an integer, you can set
a dividing ratio by setting the set
value here to a number other than 0,
and using Pn011 as the dividing
numerator and Pn503 as the dividing
denominator.
0 and
1 to 262144
−
Set
value
Output
source
Phase B
logic
0
Encoder
Non-reverse
1Reverse
2
External
encoder
Non-reverse
3Reverse
 Loading...
Loading...






