10-17
10-3 Manual Tuning
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
10
Adjustment Functions
Other Adjustments
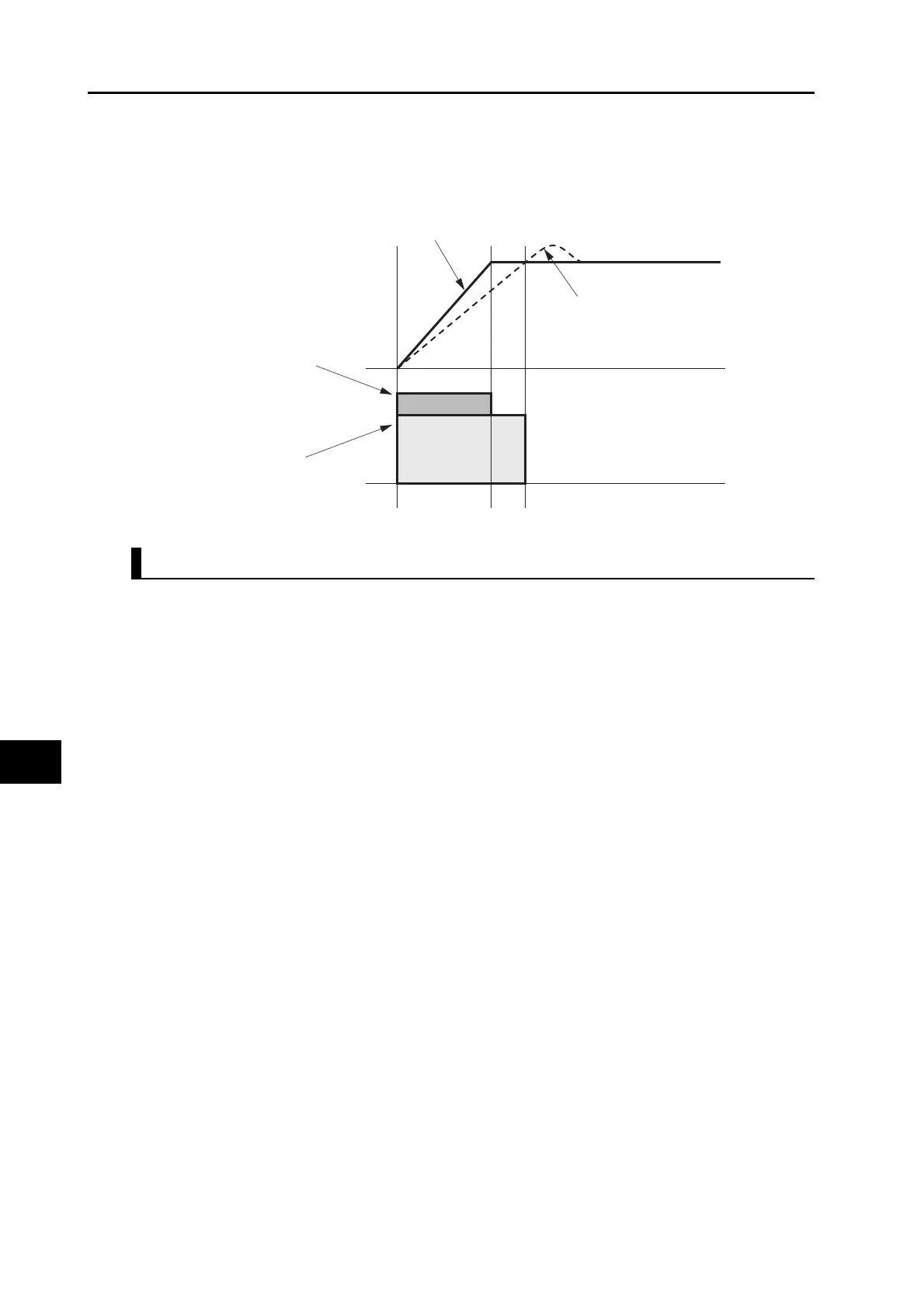
If the torque loop is saturated because the acceleration time is short or the load torque is large,
an overshooting occurs for the speed response. In such case, increase the acceleration time
to prevent the torque from saturating.
Torque Control Mode Adjustment
This is a torque control based on the speed control loop where the speed limit is the speed limit
value from Speed Limit (Pn304, Pn305, Pn306 or Pn307). This section describes the settings
for these speed limit values.
Setting Speed Limit Values
If Torque Command/Speed Limit Selection (Pn317) is 0, speed limit is the value set by Speed
Limit Value Setting (Pn321) and Reverse Direction Speed Limit Value Setting (Pn322). If Torque
Command/Speed Limit Selection (Pn317) is 1, the speed limit is the value obtained by converting
the voltage applied to analog input 1 with Torque Command Scale (Pn319).
When the motor speed approaches the speed limit value, the speed control switches to that using
Speed Limit Value Setting (Pn321) and Reverse Direction Speed Limit Value Setting (Pn322) as
commands.
To have a stable operation while the speed is limited, the parameter should be set according to
"Speed Control Mode Adjustment".
The torque may not be produced as specified by the torque command because the input to the
torque limit section is small, when the speed limit values in Speed Limit Value Setting (Pn321) and
Reverse Direction Speed Limit Value Setting (Pn322) are too low, when the speed loop gain is too
low, or when the speed loop integral time constant is 10,000 (disabled).
Command operation pattern
Momentary maximum torque at
which motor output is possible
Acceleration torque required to
accelerate according to
the command pattern
Overshooting occurs
by the delay from
the command.
 Loading...
Loading...






