11-18
11-4 Troubleshooting
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
11
Troubleshooting and Maintenance
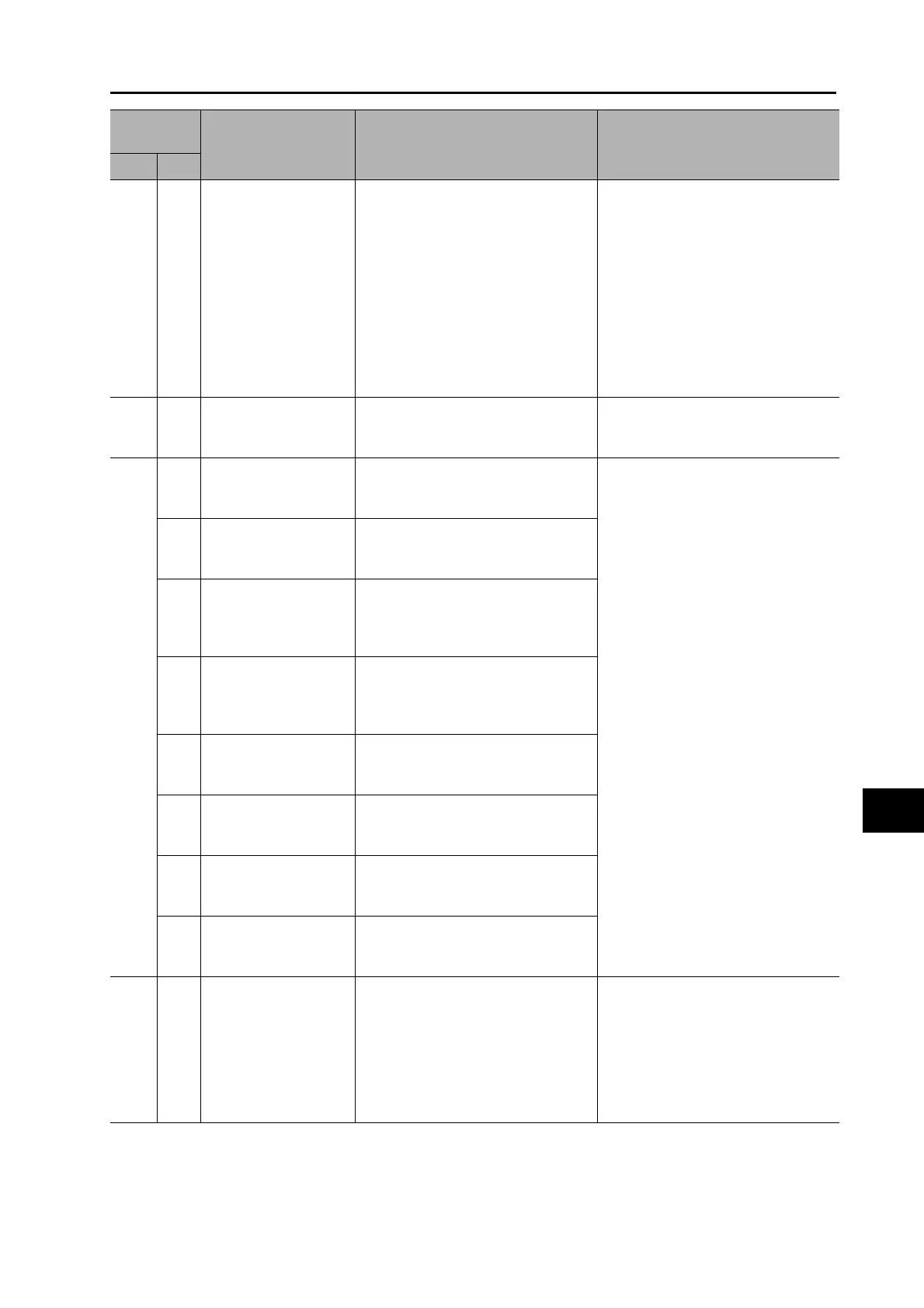
29 0 Error counter overflow
The position error for the encoder
feedback pulse reference exceeded
±2
29
(536,870,912).
· Check that the motor rotates
according to the position
command.
· Check on the torque monitor that
the output torque is not saturated.
· Adjust the gain.
· Set the No. 1 Torque Limit
(Pn013) or No. 2 Torque Limit
(Pn522) is set to the maximum
value.
· Connect the encoder cable
correctly.
30
(st)
0 Safety input error
At least one of the input
photocouplers for safety inputs 1 and
2 turned OFF.
Check the input wiring of safety inputs
1 and 2.
33
0
Interface input
duplicate allocation
error 1
There is a duplicate setting in the
input signal (IN1, IN2, IN3, IN4, and
IN5) function allocations.
Allocate the functions to the
connector pins correctly.
1
Interface input
duplicate allocation
error 2
There is a duplicate setting in the
input signal (IN6, IN7, IN8, IN9, and
IN10) function allocations.
2
Interface input function
number error 1
There is an undefined number
specification in the input signal (IN1,
IN2, IN3, IN4, and IN5) function
allocations.
3
Interface input function
number error 2
There is an undefined number
specification in the input signal (IN6,
IN7, IN8, IN9, and IN10) function
allocations.
4
Interface output
function number error
1
There is an undefined number
specification in the output signal (SO1
and SO2) function allocations.
5
Interface output
function number error
2
There is an undefined number
specification in the output signal
(SO4) function allocation.
6
Counter reset
allocation error
The error counter reset input
(ECRST) was allocated to something
other than input signal SI7.
7
Command pulse
prohibition input
allocation error
The pulse prohibition input (IPG) was
allocated to something other than
input signal SI10.
34 0 Overrun limit error
The Servomotor exceeded the
allowable operating range set in the
Overrun Limit Setting (Pn514) with
respect to the position command
input range.
· The gain is not suitable.
· The set value of Pn514 is too
small.
Check the gain (the balance between
position loop gain and speed loop
gain) and the inertia ratio.
· Increase the set value of Pn514.
Alternatively, set Pn514 to 0 to
disable the protection function.
Alarm
number
Name Cause Measures
Main Sub
 Loading...
Loading...






