RG2 User Manual – Version 1.44
Specifications is periodically reviewed and may change without notice Copyright © 2015 – 2016 by On Robot ApS. All rights reserved
4.3 Load capacity
Be aware that when grapping an object, some of the parameters below are not directly aplicative. But can be
used to calculate the load on the gripper.
The parameters in the finger tips are
calculated at the shown position
and will change in relation to the finger
positions.
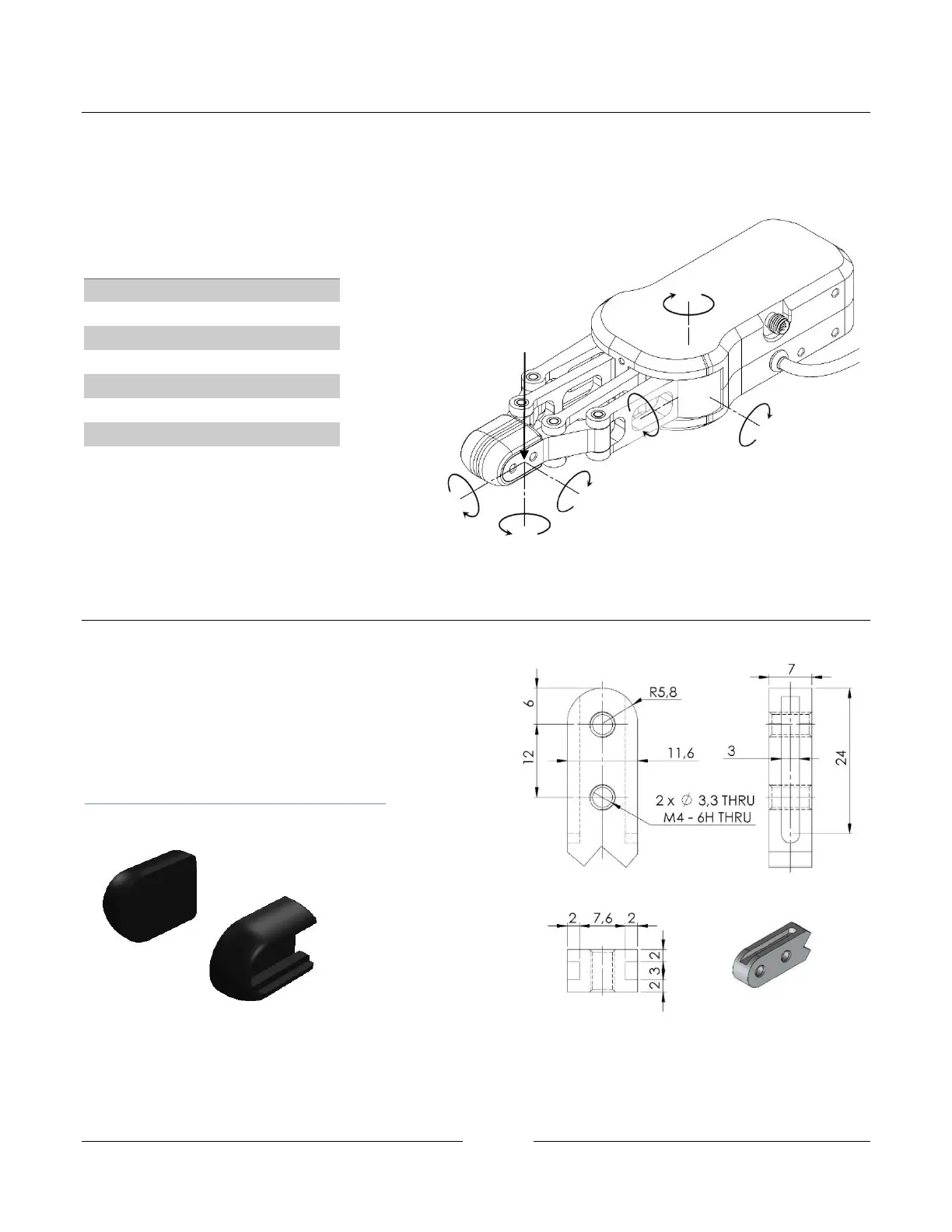
4.4 Fingers
The standard fingers can be used for many different
workpieces. If custom fingers are required, they can be
made to fit the gripper fingertips.